- @weixin_46999174
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
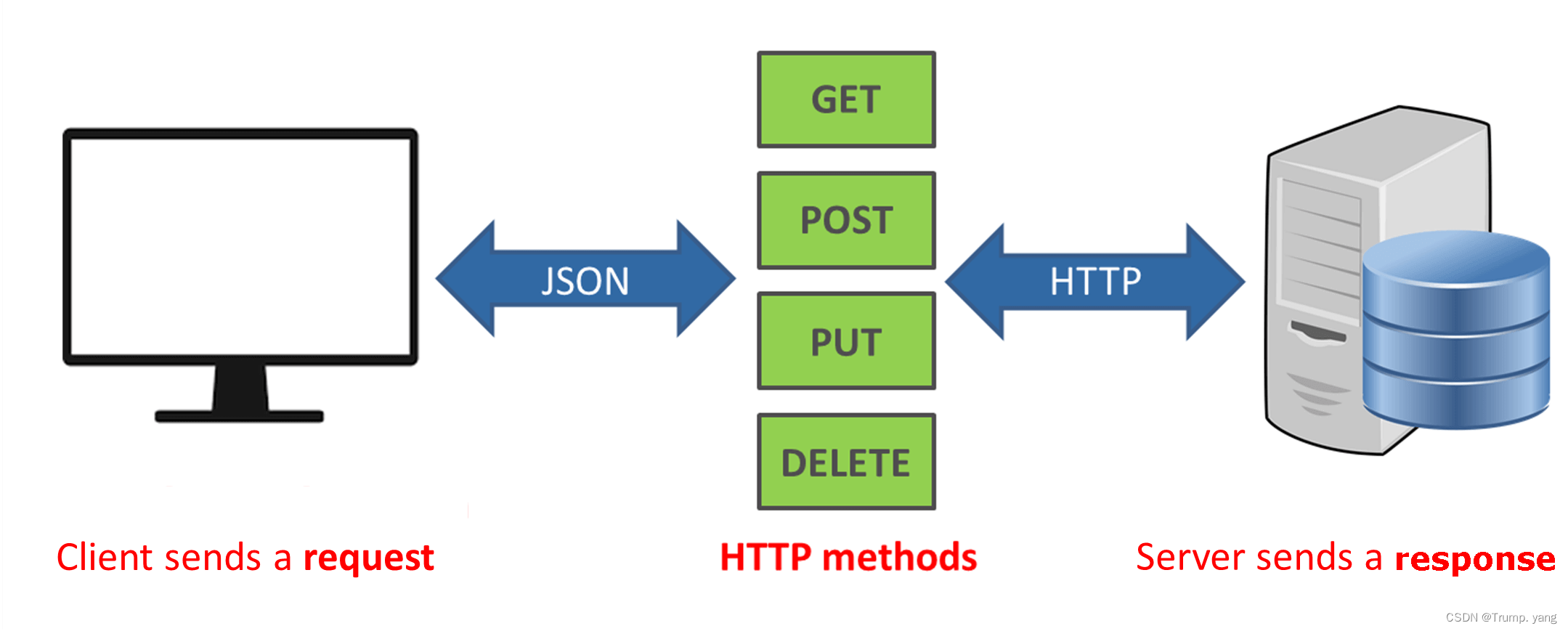
使用Django 框架实现RESTful api 接口,完成了对商品的增删改查。
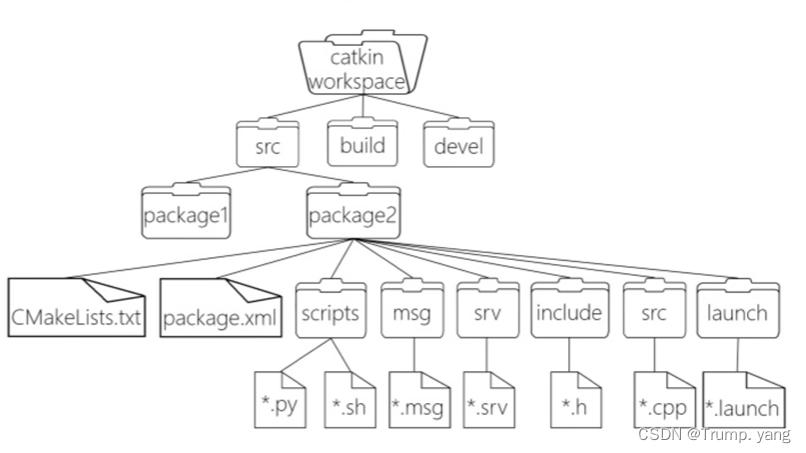
ROS(Robot Operating System,机器人操作系统)中的计算图(Computation Graph)是一个核心概念,它描述了ROS节点之间的数据流动和通信方式。计算图不仅仅是一个通信网络,它更反映了ROS设计哲学的核心——灵活性、模块化和可重用性。具体来说,ROS的计算图是由多个处理单元(节点)以及这些单元之间的通信链接(主题、服务和动作)构成的网络。每个节点代表ROS中运行的一
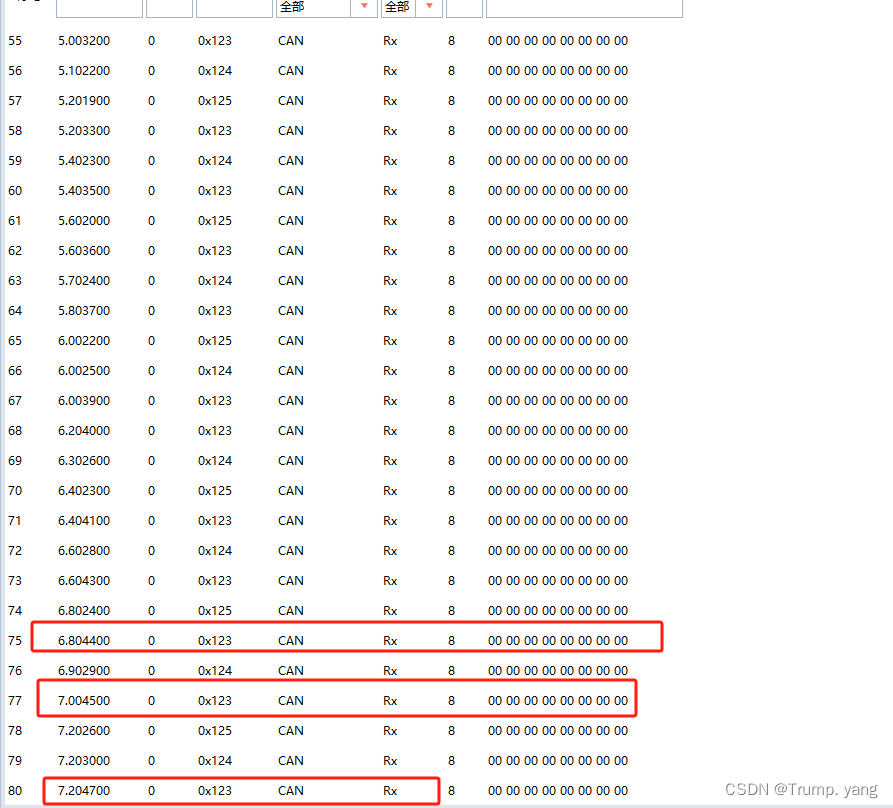
嵌入式平台下通过C语言读取发送CAN报文的详细操作。包括如果解决CAN异常掉线,过滤不需要的报文操作。
嵌入式开发—C++使用websocketpp 创建WebSocket服务器,并向浏览器发送图片 简单实现demo

在串行通信中,如UART、RS-232、SPI等,波特率的单位是bps,全称是bit per second,意为每秒钟传输的bit数量。UART(Universal Asynchronous Receiver/Transmitter,通用异步收发器)是一个广泛使用的串行通信协议,通常用于计算机与外设之间的通信。波特率(Baud Rate)是通信系统中的一个关键参数,表示每秒传输的符号数或调制信号的

嵌入式开发—C++使用websocketpp 创建WebSocket服务器,并向浏览器发送图片 简单实现demo
本文介绍了FFmpeg 从MP4文件中抽取视频H264数据的步骤流程和C语言代码实现

Android 获取到了定位数据,但是百度地图显示不了当前位置(已解决)
多边形测试(Point-in-Polygon Test)是计算机图形学和几何学中的一个经典问题,用于**确定一个给定点是否位于一个多边形内部**。这个测试在地理信息系统、计算机图形学、游戏开发和其他领域中非常有用。

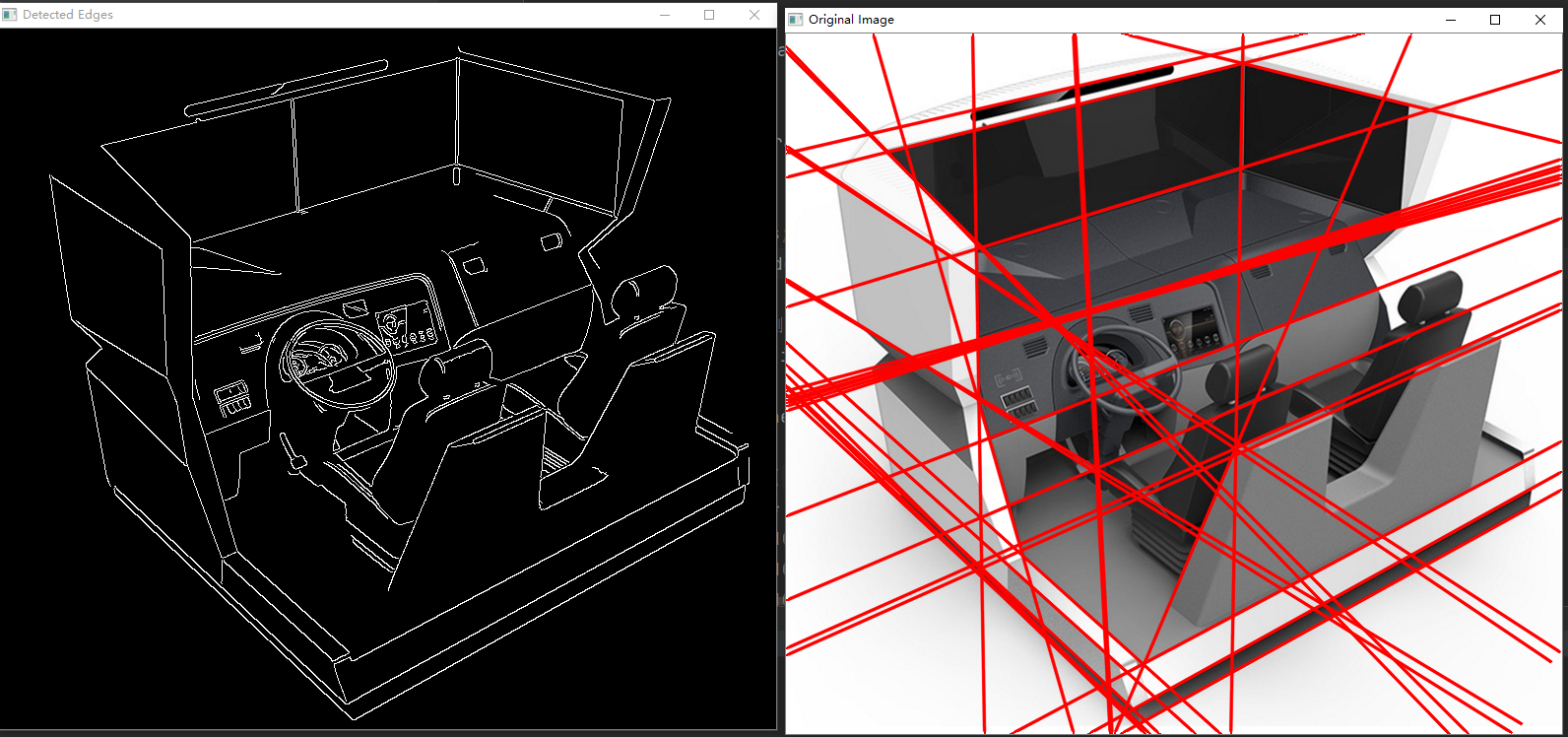
霍夫变换(Hough Transform)是一种图像分析技术,广泛用于检测图像中的形状,如直线、圆形等。霍夫直线变换特别适合于检测边缘图像中的直线。它通过将图像中的点转换到参数空间,并寻找累积的高值来确定直线的存在。