




- @weixin_43253464
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
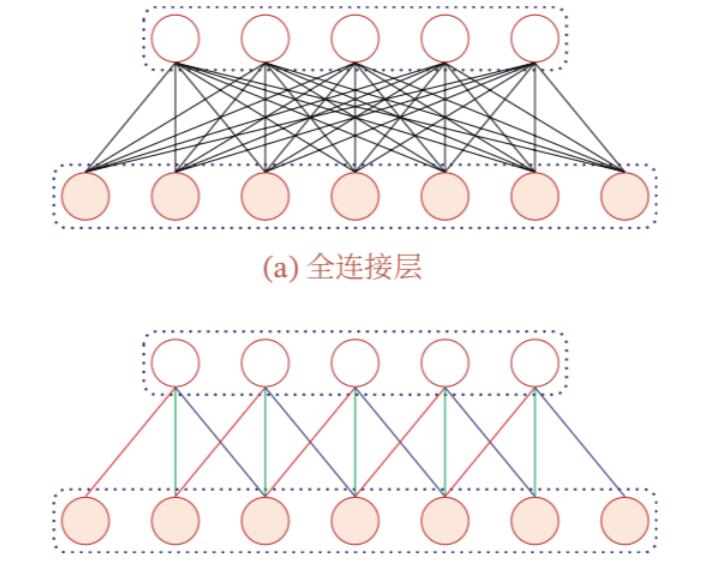
在网络中,如果全部使用全连接网络,则会使参数异常多,造成计算复杂,降低训练的效率。由此引入卷积层,卷积层能够有效减小训练参数,这与卷积具有的两个性质有关。结合自身经历以及他人的疑问,对卷积神经网络有一个误解:每个卷积核产生的feature map为一个神经元,正确的认知应该是每个神经元代表feature map的一个像素;**卷积层有两个比较重要的性质:**1 局部连接图1.全连接与卷积图2.卷积
多模态目标检测

安装rodnet最后一步时pip install -e .出现以下错误:ERROR: Command errored out with exit status 1:/home/dell/anaconda3/envs/rodnet/lib/python3.6/site-packages/torch/include/ATen/ParallelOpenMP.h:83:0: warning: ignori
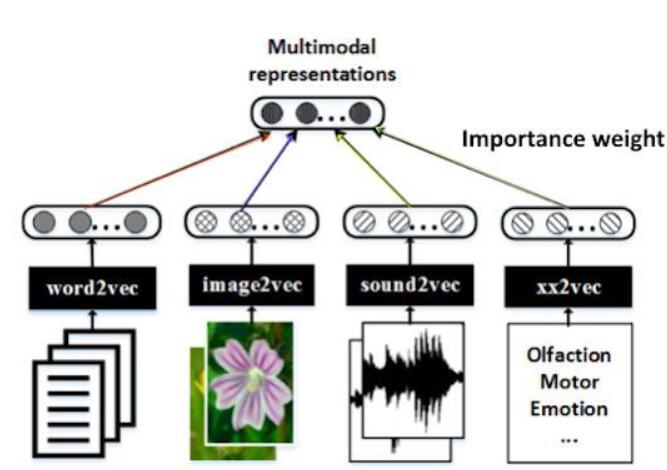
模态定位为某种类型的信息,如声音、图像、文字等。人们生活在一个多模态相互交融的环境中,生活中的各项决策都考虑了至少两种方面的信息。对单模态信息的学习上,每种模态的异构性决定了其存在不同的学习模型。虽然单模态学习在如今已经取得了显著的进步,在图像单模态的目标检测,文字识别领域等实现了较高的准确率,但是在一些其他领域:例如视频检索、图像语义理解等方面,单模态难以进行处理。
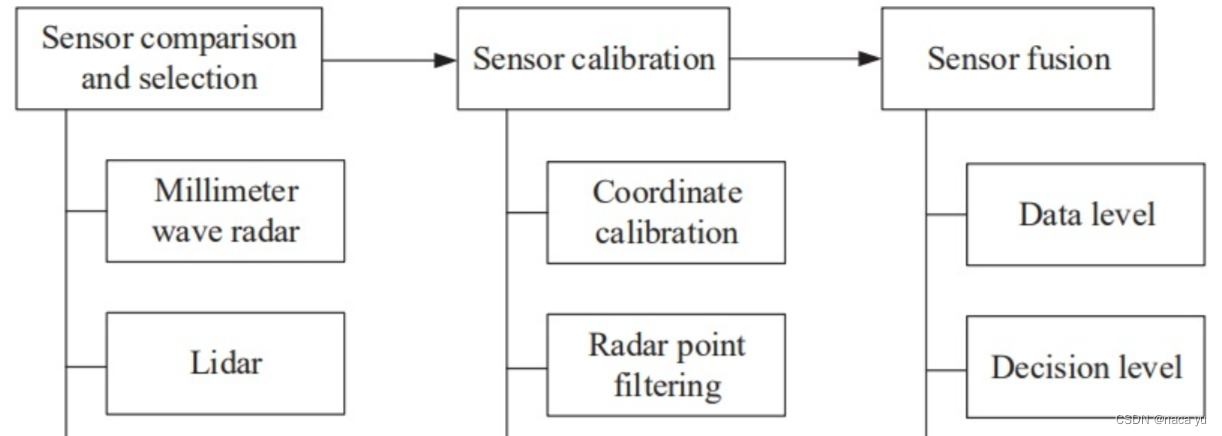
在传统的Lidar检测领域,检测方法的范式已经趋向成熟,如今的GNN兴起打开了一扇新的大门,对于毫米波数据,由于其局部的关联性强,带有明确的空间位置关系,并且数据稀疏,作者提出了一种基于GNN的毫米波雷达检测方法。首次实现了GNN在Radar上的实现在nuscenes的radar detection task榜单实现sota结果......

多模态目标检测
在炼丹日常,很多模型为了保持tensor的计算便利和维度统一(例如resnet)会涉及到很多的维度转换,这时候很容易就绕晕,在参加飞浆的transformer课程中,学习了很多灵活变化维度的方法,这些方法能够让我们减少相当一部分的维度转换的复杂度。下面逐个介绍常用的维度转换方法:reshape方法:维度重整简单的reshape方法我们就不进行介绍,主要介绍reshape中-1的灵活运用,我们可以轻

问题:近期开机多次占用内存50%以上,传统的内存整理和清理无效解决思路一:修复漏洞,有时候升级或者软件兼容会导致一些高危漏洞引起的内存泄漏等占用内存的情况,这时候需要通过第三方软件查寻漏洞问题。解决思路二:查杀病毒,最近我中了局域网的一款病毒,这种病毒带来的显著问题就是后台找不到占用的内存但是内存占用异常,通过查杀病毒就可以解决。用windows自带的windows内存诊断可以解决:进入控制面板-