写文章




- @warren103098
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
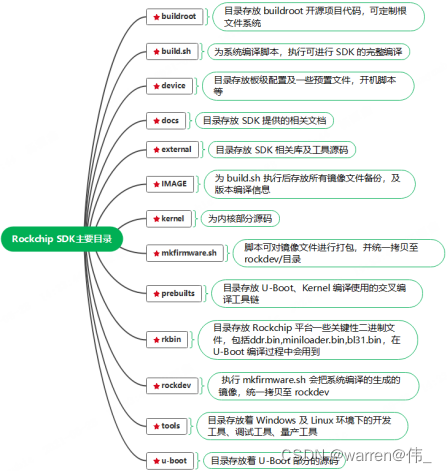
[智能AI摄像头]使用docker搭建RV1126开发环境
使用docker搭建RV1126开发环境
BM1684X搭建sophon c++环境
BM1684X搭建sophon c++环境
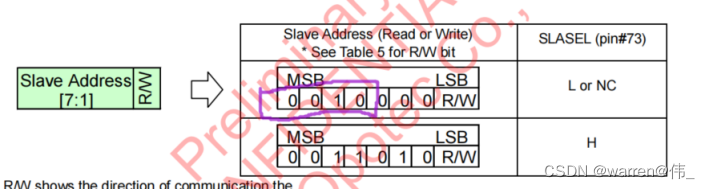
嵌入式系统中的常用总线协议讲解包括(UART、IIC、SPI等)
嵌入式系统中的常用总线协议讲解包括(UART、IIC、SPI等),个人学习用,如有错误,欢迎指正!
海思HI3516 MIPI屏幕调试笔记
海思HI3516 DV300 配置mipi屏幕的相关配置过程以及知识点
海思Hi3516-IVE调试
海思Hi3516-IVE调试
海思Hi3516新增sensor imx214 笔记
海思Hi3516新增sensor imx214 笔记
海思Hi3516移植opencv以及错误调试
海思Hi3516移植opencv以及错误调试

海思Hi3516-HDMI调试笔记
海思Hi3516-HDMI调试笔记
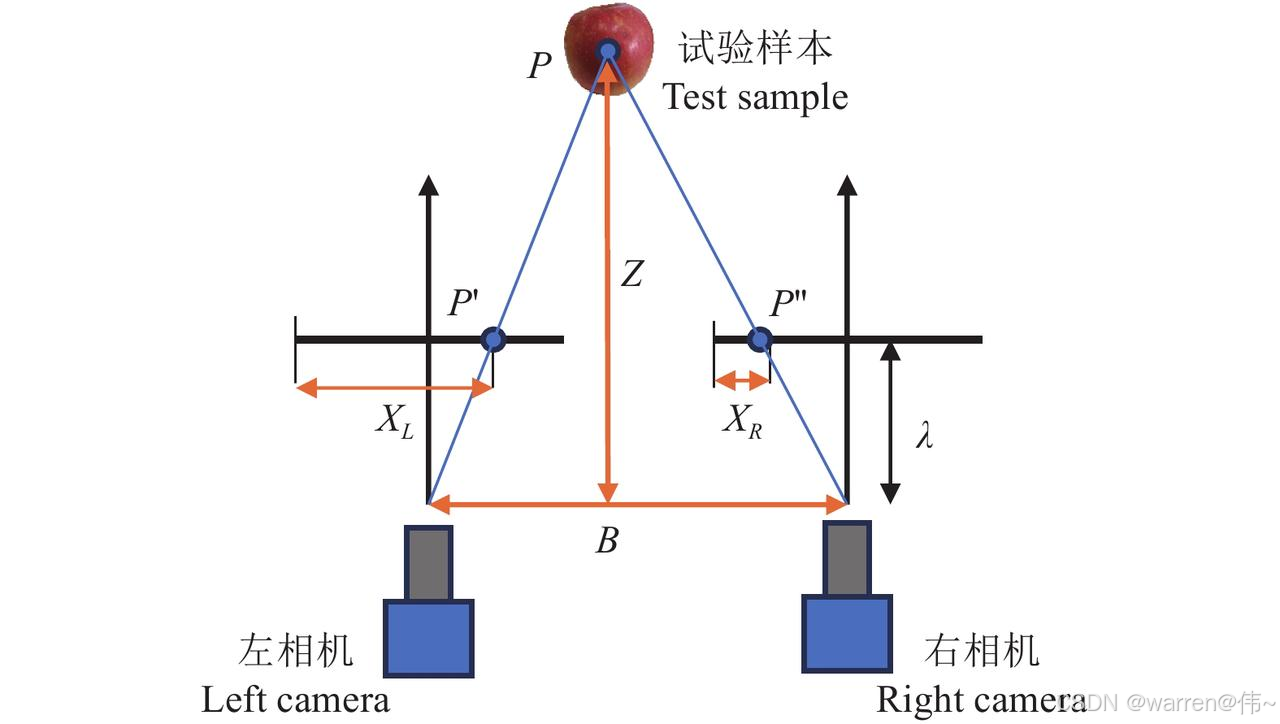
[三维重建]立体匹配概述
立体匹配是二维图像恢复三维图像的其中一个阶段,目的是得到稠密的三维点云,是制作数字表面模型、深度估计、三维重建、现实增强、工业缺陷检测的基础