- @shiwei0813
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
init# 简单的状态表示,将激光雷达数据划分为几个区域state = []self.q_table[state] = [0] * 3 # 三个动作:前进、左转、右转# 简单的epsilon-greedy策略else:initinitif self.prev_action == 0: # 前进self.reward = 1 # 假设前进是正奖励elif self.prev_action == 1:
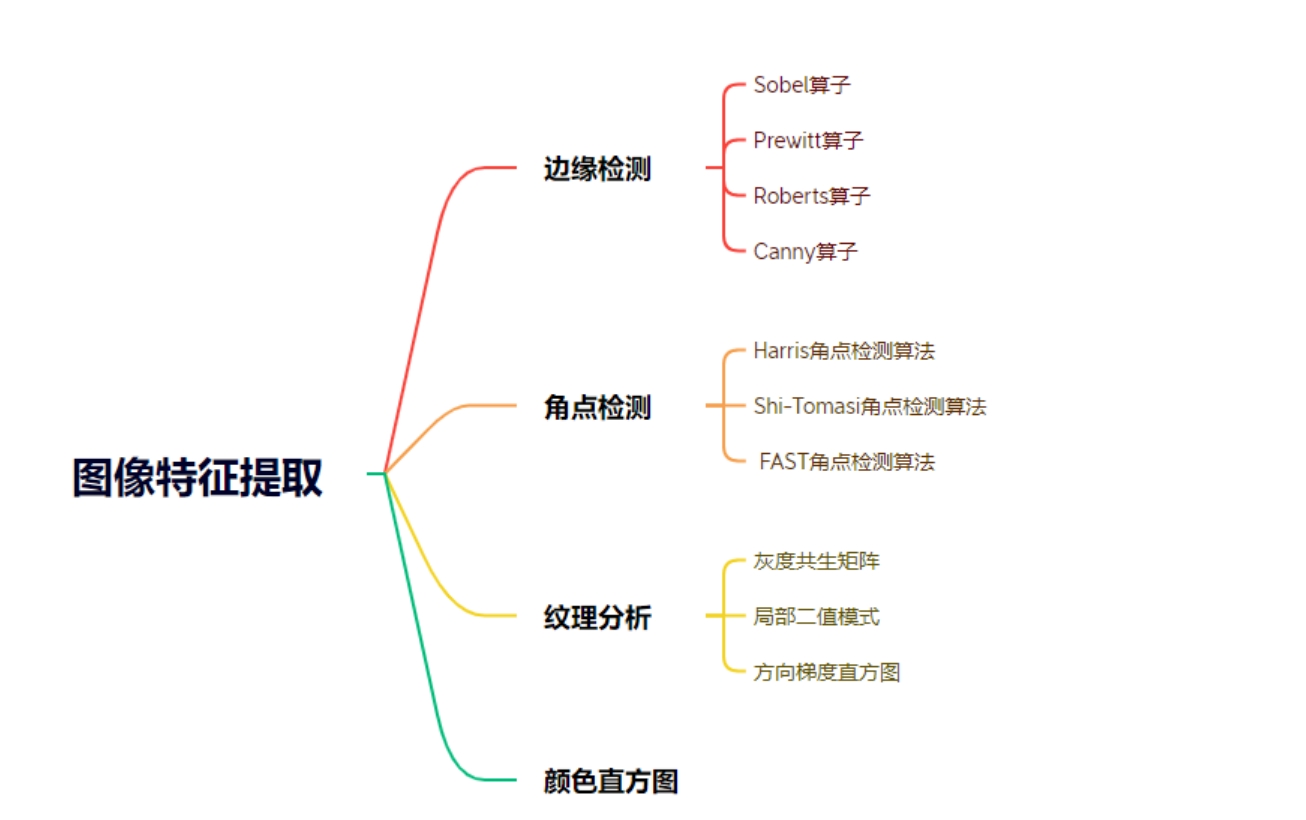
计算机视觉图像特征提取是指从图像中提取出具有代表性的特征,以便计算机能够更好地理解和处理图像。常用的特征提取方法包括边缘检测、角点检测、纹理分析、颜色直方图等。在深度学习领域,卷积神经网络(CNN)也被广泛应用于图像特征提取任务。通过CNN,可以自动学习出图像中具有代表性的特征,从而提高计算机视觉领域的各项任务的准确性。
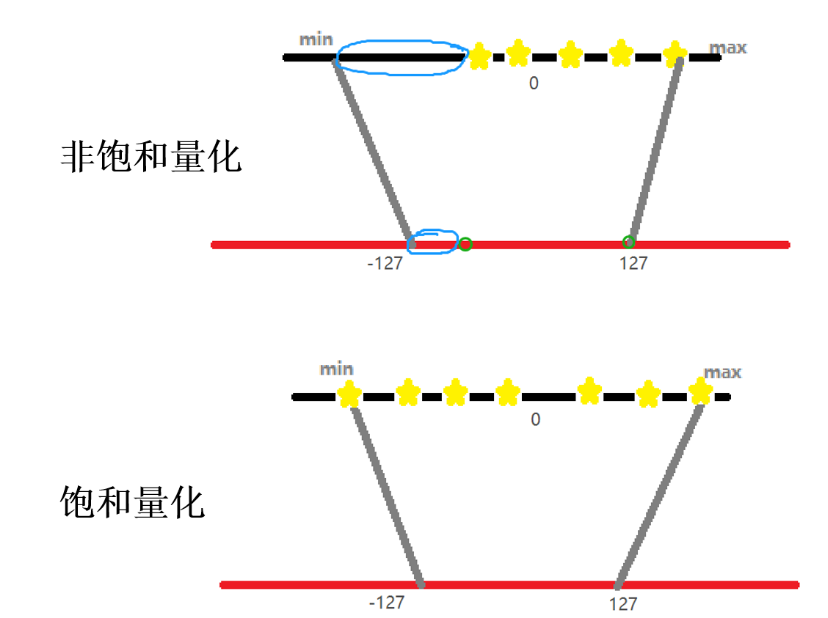
深度学习中的量化技术通过将高精度浮点数(如32bit)转换为低精度(如8bit)表示,实现模型轻量化和推理加速。量化分为对称量化和非对称量化:对称量化保持零点对齐,计算简单但存在数据非饱和问题;非对称量化引入偏移量Z修正零点,能更好处理数据分布不均但计算量更大。量化可减少75%模型大小、降低内存需求和功耗,但会带来精度损失和操作复杂度增加。针对不同场景,还可采用激活值饱和量化等改进方法优化性能。目
OVP芯片是电子系统中用于过压保护的关键器件,通过实时监测输入电压并快速响应异常,防止后端电路损坏。其核心工作原理包括电压采样比较、阈值设定和保护执行(截止或钳位模式),响应时间可达微秒级。在嵌入式系统(如STM32)中,OVP芯片能有效保护3.3V供电电路,并可通过GPIO实现故障检测。选型需关注阈值电压、响应时间、工作电流等参数,适用于消费电子、智能设备等高可靠性场景。
深度学习中的量化技术通过将高精度浮点数(如32bit)转换为低精度(如8bit)表示,实现模型轻量化和推理加速。量化分为对称量化和非对称量化:对称量化保持零点对齐,计算简单但存在数据非饱和问题;非对称量化引入偏移量Z修正零点,能更好处理数据分布不均但计算量更大。量化可减少75%模型大小、降低内存需求和功耗,但会带来精度损失和操作复杂度增加。针对不同场景,还可采用激活值饱和量化等改进方法优化性能。目
我们对大模型相关的发展历史、openAI技术的发展脉络、当前国内外主流的大语言模型进行了简单的介绍,同时针对大模型区别于之前模型的核心技术原理进行了简单讲解,本章提到的预训练、指令微调、对齐微调、上下文学习、思维链提示、规划等核心技术读者需要了解。相信通过本章的讲解,读者大致了解了大模型相关的知识。在最后一节从内容生成、问题解答、互动式对话、生产力工具/企业服务、搜索推荐等5个维度介绍了大模型能够
深度学习中做量化提升运行速度是最常用的方法,尤其是大模型这类非常吃GPU显存的方法。一般是高精度浮点数表示的网络权值以及激活值用低精度(例如8比特定点)来近似表示达到模型轻量化,加速深度学习模型推理,目前8比特推理已经比较成熟。比如int8量化,就是让原来32bit存储的数字映射到8bit存储。int8范围是[-128,127], uint8范围是[0,255]。
最近,腾讯云推出了一款自研的代码助手,可以极大的助力程序员编写代码,简直太香了。接下来就和大家介绍这款代码助手的神奇之处吧,据说腾讯云代码助手是腾讯自研的AI编程提效工具,凭借腾讯混元与 DeepSeek 混合模型,专为开发者打造。CodeBuddy不仅支持200+编程语言、兼容多种主流IDE,是国内首个支持 MCP 的代码助手,还为开发者提供开发智能体 Craft、智能代码补全、单元测试、代码诊

摘要:本文介绍了电子烟产品的4种主流屏幕驱动方案(含2025年最新方案)。方案一(WT588F02KD)集成LED显示与语音播报功能;方案二(WT2801)整合LED驱动、蓝牙5.3和语音功能;方案三(WT2000T4)实现LCD显示与语音协同;方案四(WT2606B)作为2025年旗舰方案,融合TFT/AOMLED显示、语音控制及蓝牙透传,推动电子烟智能化升级。各方案均注重功能集成、开发便捷性和
XACRO是URDF文件的进阶版本,用于简化机器人模型的描述。其主要功能包括:1. 通过宏定义实现部件复用,减少重复代码;2. 支持参数化配置,可动态调整部件属性;3. 包含条件语句,可根据不同需求生成不同模型。文件结构包含命名空间声明、宏定义、参数设置、条件语句等核心元素。实际应用时,通过<gazebo>标签配置仿真参数,包括物理属性、传感器和控制插件。典型工作流程是:先定义机器人结