- @qsl56789
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
通过CAN和RS232控制机器人地盘

sudo apt-get install ros-melodic-ecl-exceptionssudo apt-get install ros-melodic-ecl-threadssudo apt-get install ros-melodic-ecl-geometrysudo apt-get install ros-melodic-kobuki-dock-drivesudo apt-get i
这里写自定义目录标题下载GIT下载Git服务器软件命令cmd命令如何改变文本的样式插入链接与图片如何插入一段漂亮的代码片生成一个适合你的列表创建一个表格设定内容居中、居左、居右SmartyPants创建一个自定义列表如何创建一个注脚注释也是必不可少的KaTeX数学公式新的甘特图功能,丰富你的文章UML 图表FLowchart流程图导出与导入导出导入下载GIThttps://pan.baidu.co
看了一下现在git上面的开源项目,一共找到了11个有点少,而且大部分是做静态处理的只有少数是能够实时显示的。先找一个功能齐全能够满足要求的先跑起来看看情况。经过两天在GitHUb中的浸泡,大概明白了前后端的区别,前端使用html语言设计网页的结构。后端(数据端)使用Flask框架做数据的交互。新开一个需要使用YOLO做两个物体的对接,同时,要将YOLO的画面实时显示在前端。

配置环境anaconda(python2.7 版本)链接: link.1、Anaconda2安装ROS 1中使用的是 python2.7,所以在地址:https://www.anaconda.com/download/#linux 中下载 python2.7版本的Anaconda2 ,安装过程如下:chmod +x Anaconda2-5.2.0-Linux-x86_64.shbash Anaco
概念:1、Gmapping是基于滤波SLAM框架的常用开源SLAM算法。2、Gmapping基于RBpf粒子滤波算法,即将定位和建图过程分离,先进行定位再进行建图。3、Gmapping在RBpf算法上做了两个主要的改进:改进提议分布和选择性重采样。优缺点:优点:Gmapping可以实时构建室内地图,在构建小场景地图所需的计算量较小且精度较高。相比Hector SLAM对激光雷达频率要求低、鲁棒性高
语义地图和几何地图的区分几何地图语义地图几何地图几何图,2D,纯以点、线、多边形三种元素构成的图层,是道路和建筑位置、边界及方向的一个抽象,而存储时只存储点的坐标,常见的便是经纬度坐标。多点一起存储便是折线,闭合折线是多边形。语义地图语义图不是一个单独的图层,语义图能够以以上任何一种地图作为载体,将语义映射到其中。举个例子,红绿灯这个物体作为一个语义,(1)在几何图上,表示为一个点,有经纬度;(2
看了一下现在git上面的开源项目,一共找到了11个有点少,而且大部分是做静态处理的只有少数是能够实时显示的。先找一个功能齐全能够满足要求的先跑起来看看情况。经过两天在GitHUb中的浸泡,大概明白了前后端的区别,前端使用html语言设计网页的结构。后端(数据端)使用Flask框架做数据的交互。新开一个需要使用YOLO做两个物体的对接,同时,要将YOLO的画面实时显示在前端。
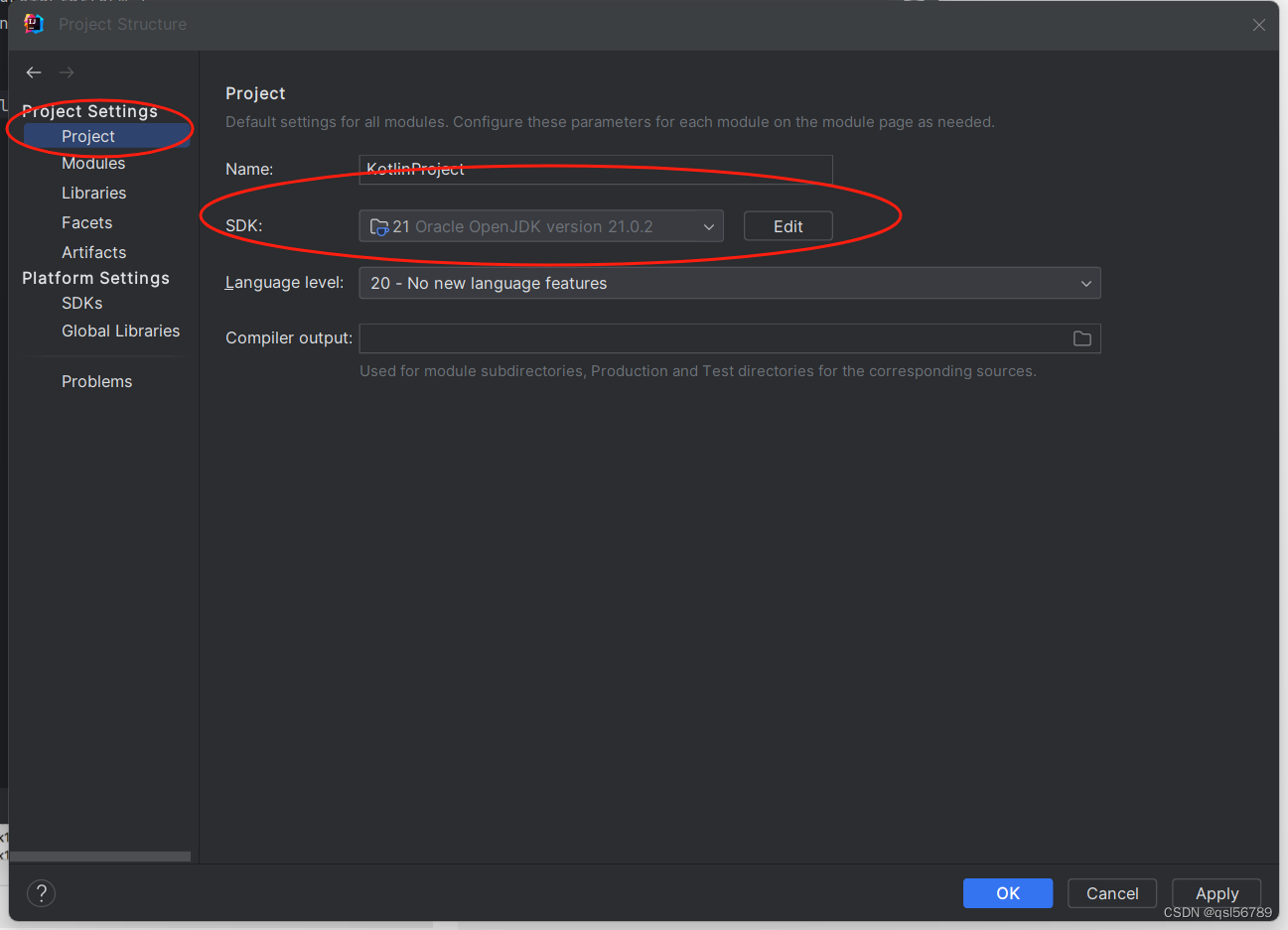
点击Edit会出现这个界面,找到自己的SDK的路径,然后一直点击Next,他会自动下载一些组件之类的东西,这里需要稍微等待一下。现在遇到一个问题,旧版的idea setting中是有安卓SDK的,新版的为什么没有了?需要手动添加,先在project structure中的project中配置JDK。在配置完成SDK之后,我们可以新建一个项目,选择新建Android项目,等下载完成之后,再回到这里就