




- @qq_51963216
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
采用FLYMCU烧写可以不经过JTAG/SWD烧写,重新烧录程序重启单片机就可以了。httpshttpshttpshttpshttps。
深度学习文章目录深度学习前言一、深度学习简介二、深度学习与神经网络三、常用深度学习框架四、YOLOV3框架总结前言ROS只是用来操控机器人的系统,要想做的真正为社会服务,还是需要结合AI。一、深度学习简介在介绍深度学习之前,先和大家介绍一下人工智能、机器学习和深度学习这 三者之间的关系。 人工智能就是我们常说的 AI,在 1956 年被科学家们提出这一概念,科学家探讨能不能制造出一个可以像人类大脑
深度学习文章目录深度学习一、安装NVIDIA驱动二、禁用nouveau三、安装准备1.安装GCC、g++、make2.卸载旧的驱动四、安装驱动一、安装NVIDIA驱动首先需要根据 NVIDIA 显卡型号安装显卡驱动。 去 NVIDI 官网 ,查看 适合你的 GPU 的驱动。 选择 GPU 产品类型(以 NVIDIA GT 1030 示例),查找适合的驱动如下图:找到的驱动版本如下所示:下 载 NV

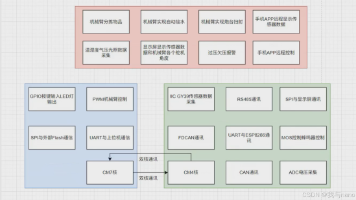
本文介绍了一个基于STM32H755双核处理器的智能机械臂控制系统。该系统充分利用CM7和CM4双核架构优势,实现了机械臂分拣、自动接水、炮台扫射等功能,同时集成了温湿度、气压等多传感器数据采集。硬件设计包含PWM舵机控制、I2C传感器通信、SPI显示屏交互等模块,并通过WiFi实现手机APP远程控制。系统采用三层架构设计,通过双核协同处理提高并行能力,为小型自动化场景提供了高效解决方案。项目展示
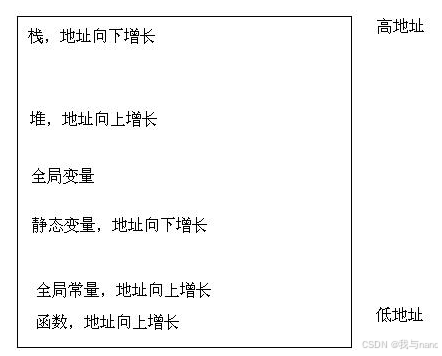
C语言中的变量根据其类型和生命周期被分配到内存的不同区域。栈区用于存放局部变量,堆区用于动态分配的内存,全局区(静态区)存放全局和静态变量,常量区存储常量,代码区存放程序代码。栈区由编译器自动管理,堆区需要程序员手动分配和释放。全局区和常量区在程序结束时由系统释放。通过Keil工具对STM32系统的验证,可以观察到不同变量在内存中的具体分布情况,如栈区变量的连续地址、堆区的不连续地址分配,以及全局
Python爬虫学习文章目录Python爬虫学习一、查看二、具体实现总结一、查看1、查看页面源代码是否有相关信息2、一般得图片都包含子页面链接3、提取子页面链接4、获取下载链接二、具体实现import requestsfrom bs4 import BeautifulSoupimport timedomain='https://unsplash.com/'url='https://unsplash
Python数据结构文章目录Python数据结构一、列表列表方法将列表当做堆栈使用将列表当作队列使用嵌套列表解析del 语句二、元组和序列三、集合四、字典遍历技巧一、列表列表方法Python中列表是可变的,这是它区别于字符串和元组的最重要的特点,一句话概括即:列表可以修改,而字符串和元组不能。注意:类似 insert, remove 或 sort 等修改列表的方法没有返回值。将列表当做堆栈使用列表
这篇文章主要介绍opencv和ROS中的图像转换。详细的功能可以去古月居的课程里面去看,这里不过多的赘述。
STM32接入阿里云文章目录STM32接入阿里云前言一、所需环境二、配置步骤1.烧录固件2.stm32的配置总结前言在这之前学习了ESP8266接入阿里云,平台是arduino,虽然很简单,但是弊端也很明显,arduino的功能相较于32还是有的拉跨,在做一些项目上,还是使用32更加方便一些,于是便开始了stm32的上云之路。一、所需环境STM32F103ZET6ESP8266技小新软件,keil
主要是工训赛、电赛、光电、集成电路等等,会分享一些开源代码,博主自己做的项目,自己画的PCB等等,包含但不限于STM32、K210、V831、机器视觉,机械臂,ROS,STM32最小系统板打板文件,K210打板文件、ESP8266,物联网、各类传感器等等。群里不打广告,只是一些对嵌入式感兴趣的同学,大家一起交流学习。博主也想拓宽自己的知识面。感兴趣的同学欢迎进群交流嗷。感兴趣的同学、朋友可以加入群