




- @qq_40431685
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
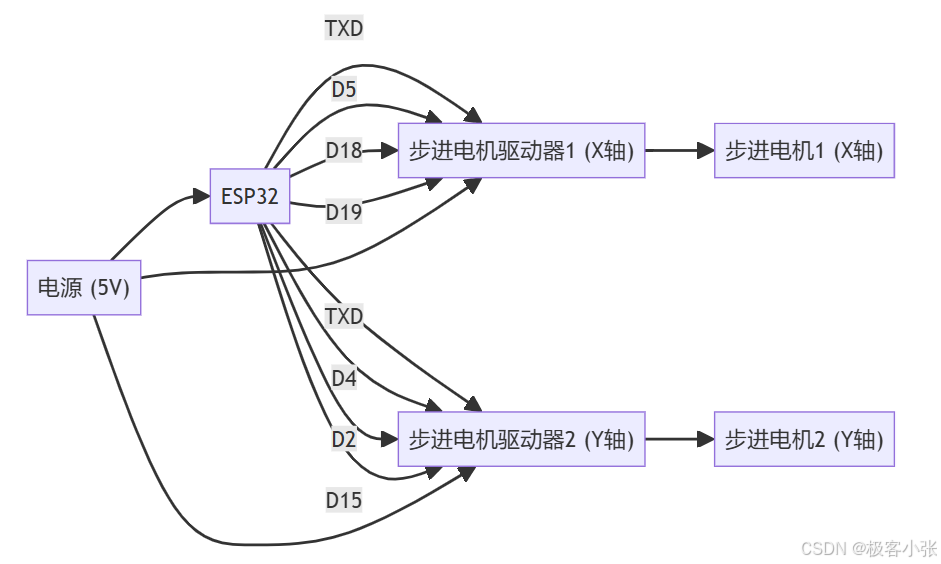
本项目利用 ESP32 强大的性能和丰富的接口资源,精确控制两个步进电机分别驱动 X-Y 轴的移动,从而引导笔尖在纸面上书写文字。
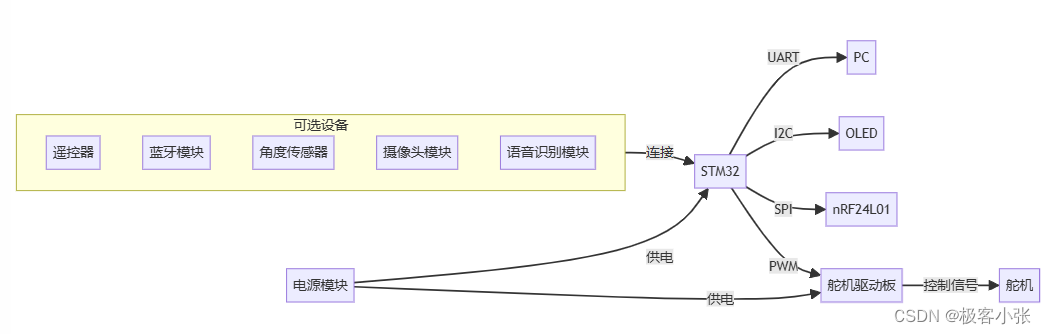
随着工业自动化和智能制造的快速发展,机械臂作为一种重要的自动化设备,其应用领域不断扩展。为了满足日益增长的应用需求,开发一款功能丰富、易于扩展的智能机械臂控制系统具有重要意义。本项目设计并实现了一种基于STM32的智能机械臂控制系统,该系统功能丰富、易于扩展,可广泛应用于教育、娱乐、工业等领域。优化运动控制算法,提高机械臂的运动精度和稳定性。开发上位机软件,提供更友好的用户界面和更强大的功能支持。
本文介绍了如何使用 ESP32 构建蓝牙网关,实现蓝牙设备与 Wi-Fi/互联网之间的连接和数据桥接。通过结合 ESP32 强大的硬件功能和灵活的软件库,您可以轻松构建自定义的蓝牙网关解决方案,满足各种物联网应用的需求。本文提供的代码示例仅供参考,您需要根据实际需求进行修改和完善。在实际应用中,您可能需要考虑安全性、功耗优化和数据可靠性等方面的问题。

随着城市化进程的加快,垃圾分类变得越来越重要。本文设计了一套基于STM32F103单片机、图像处理技术和传感器技术的智能垃圾分类系统。该系统能够自动识别垃圾类型,并通过机械装置进行准确分类,有效提升垃圾分类的效率和准确性。本文设计的智能垃圾分类系统实现了以下主要功能:实时图像采集与处理:通过OpenMV模块实时捕获图像,并使用SSD算法进行目标识别,能够识别多种类型的垃圾(如可回收物、厨余垃圾等)

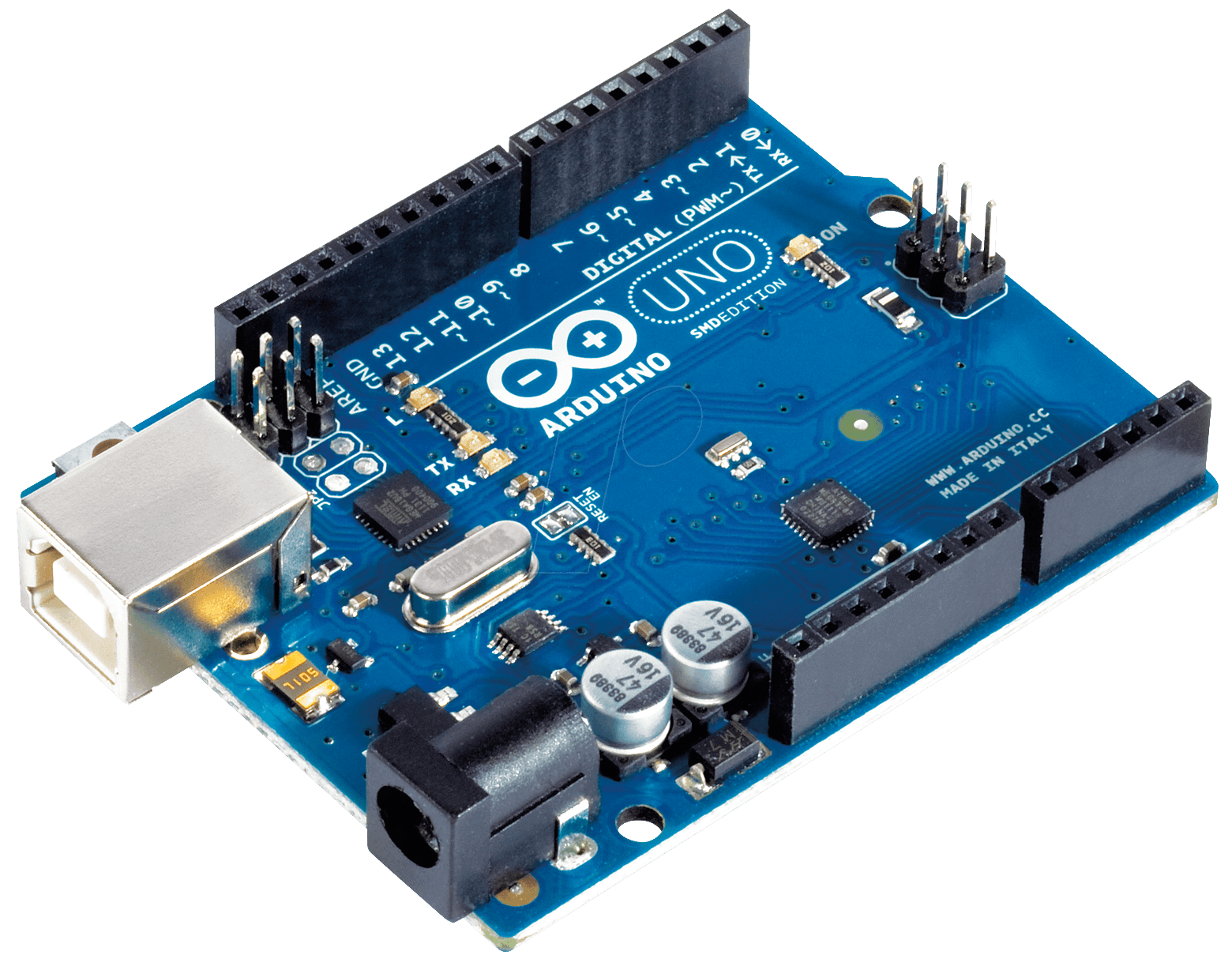
ATmega328P 是 Arduino Uno 所使用的微控制器芯片。CPU:8位AVR RISC架构,具有丰富的指令集和高效的执行速度。时钟速度:16 MHz,提供了快速的处理能力。闪存:32 KB,用于存储用户程序代码。SRAM:2 KB,用于存储运行时的数据。EEPROM:1 KB,用于存储需要在掉电后保留的数据。I/O 引脚:23个通用输入输出引脚,其中6个可用于PWM输出。ADC:6通
随着物联网和人工智能技术的飞速发展,家庭安全愈发受到重视。本项目旨在构建一套基于边缘计算的智能家居安全系统,利用STM32微控制器和树莓派4B作为核心硬件,实时分析摄像头数据,智能识别异常行为(如入侵、跌倒等),并即时发出警报。系统采用Python和C语言进行开发,其中树莓派运行TensorFlow/Keras深度学习模型,结合OpenCV进行图像处理,确保高效的行为识别。
通过Raspberry Pi、NVIDIA Jetson和STM32的协作和多光谱相机和土壤湿度传感器的集成,使得机器人能够获取重要的农业数据。利用OpenCV进行图像处理,结合机器学习算法实现病害检测,提升了植物监测的智能化程度,通过LoRa和Wi-Fi实现数据的远程传输,确保农户能够实时获取农田的状态。使用ROS进行机器人导航,使得机器人能够自主移动,完成巡检任务。
本项目旨在开发一款基于 STM32 控制的自动平滑机器人,结合步进电机和陀螺仪传感器,实现对平衡机器人的精确控制。该机器人可以用于教育、科研、娱乐等多个领域,帮助用户了解自动控制、机器人运动学等相关知识。本项目的主要目标是设计并实现一款基于 STM32 的自动平滑机器人。项目的核心功能包括:实时数据采集:使用陀螺仪传感器(如 MPU6050)获取机器人的角速度和角度数据,实现对机器人的实时姿态监测

在科技迅速发展的背景下,嵌入式自主移动机器人作为一个具有广泛应用前景的研究领域,吸引了众多开发者的关注。本文详细介绍了一个嵌入式自主移动机器人项目,重点阐述了其硬件与软件系统设计及代码实现。硬件部分采用ESP32、Raspberry Pi和Arduino作为嵌入式控制器,结合激光雷达、超声波传感器和摄像头等多种传感器,实现环境感知和数据采集。软件系统基于Raspberry Pi OS,主要使用Py
本文将手把手教你搭建一个完整的物联网数据监控平台,使用STM32采集温湿度数据,通过ESP8266 WiFi模块上传至Linux服务器,并利用Python脚本将数据存储到MySQL数据库,最后实现每日平均值的计算和可视化展示。
