




- @maniuT
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
话不多说,让我们马上开始这一章学习吧!
一般情况下,我们自己如果需要使用某个驱动,编写的代码要存放在app目录下,这里我们以app_demo_pwm.c为例。4.鸿蒙开发系统底层方向。1.项目开发必备面试题。5.鸿蒙音视频开发方向。6.鸿蒙车载开发方向。7.鸿蒙南向开发方向。

读写锁与互斥锁类似,可用来同步同一进程中的各个任务,但与互斥锁不同的是,其允许多个读操作并发重入,而写操作互斥。
这里我直接用许思维老师之前移植好的代码,不过由于鸿蒙版本更新过快,许思维老师之前的代码是基于1.0版本,直接拿到3.0以上版本编译会出错,这里我修改了编译错误。Hispark WiFi开发套件又提供一个oled屏幕,但是鸿蒙源码中没有这个屏幕的驱动,我们需要自己去移植。使用引脚:HI_IO_NAME_GPIO_13 、 HI_IO_NAME_GPIO_14。测试代码,里面有一个ssd1306_de

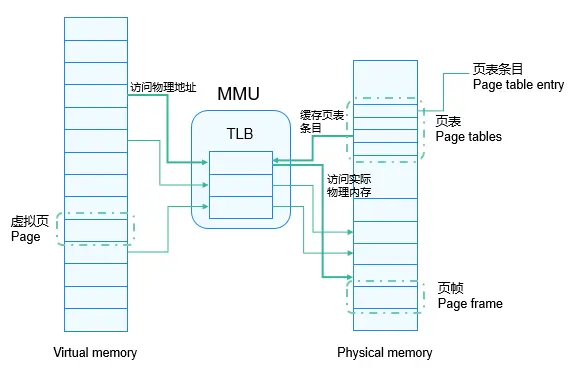
从上文可知,用户程序加载启动时,会将代码段、数据段映射进虚拟内存空间,此时并没有物理页做实际的映射;程序执行时,如下图(图片来自OpenHarmony docs开源站点)粗箭头所示,CPU访问虚拟地址,通过MMU查找是否有对应的物理内存,若该虚拟地址无对应的物理地址则触发缺页异常,内核申请物理内存并将虚实映射关系及对应的属性配置信息写进页表,并把页表条目缓存至TLB,接着CPU可直接通过转换关系访
栅格布局容器根节点,使用grid-row与grid-col进行栅格布局。

通过给各个组件绑定不同的手势事件,并设计事件的响应方式,当手势识别成功时,ArkUI框架将通过事件回调通知组件手势识别的结果。
通用事件按照触发类型来分类,包括触屏事件、键鼠事件、焦点事件和拖拽事件。触屏事件 :手指或手写笔在触屏上的单指或单笔操作。键鼠事件 :包括外设鼠标或触控板的操作事件和外设键盘的按键事件。焦点事件:通过以上方式控制组件焦点的能力和响应的事件。拖拽事件:由触屏事件和键鼠事件发起,包括手指/手写笔长按组件拖拽和鼠标拖拽。事件分发:描述触控类事件(不包括按键,焦点)响应链的命中收集过程。手势事件由绑定手势

Promise和async/await提供异步并发能力,是标准的JS异步语法。异步代码会被挂起并在之后继续执行,同一时间只有一段代码执行,适用于 单次I/O任务 的场景开发,例如一次网络请求、一次文件读写等操作。

FA模型下只有一个Context。Context中的所有功能都是通过方法来提供的,它提供了一些featureAbility中不存在的方法,相当于featureAbility的一个扩展和补全。
