




- @m0_64346597
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
监督学习就是最常见的分类(注意和聚类区分)问题,通过已有的训练样本(即已知数据及其对应的输出)去训练得到一个最优模型(这个模型属于某个函数的集合,最优表示某个评价准则下是最佳的),再利用这个模型将所有的输入映射为相应的输出,对输出进行简单的判断从而实现分类的目的。监督学习的目标往往是让计算机去学习我们已经创建好的分类系统(模型)。输入数据没有被标记,也没有确定的结果,样本数据类别未知,需要根据样本
【代码】基于python的点云降采样。

通过上图可以看到每一个卷积层都能学到一点东西,全连接层的作用就是把各个卷积层学到的东西给组合起来。softmax的作用是在全连接层后完成概率分布,得出最终分类概率。
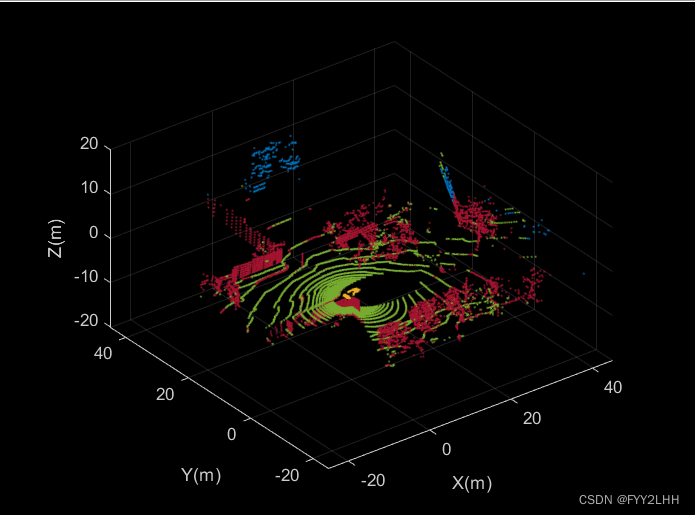
在该示例中,车辆坐标系原点位于后轴中心,正X方向指向前方,正Y方向指向左侧,正Z方向指向上方,激光雷达安装在车辆的顶部中心,与地面平行。为了从激光雷达数据中识别障碍物,首先使用segmentGroundFromLidarData函数对地面进行分段,从有组织的激光雷达数据中分割出属于地平面的点。点云的位置属性是M×N×3的矩阵,包含点的X,Y,Z坐标(m)。激光雷达安装在车辆顶部,点云可能包含属于车
将数据集整理好放在正确的位置即可,视频下方有评论遇到的问题,参照着解决即可。残差网络resnet可用于迁移学习,学习过程参考哔哩哔哩。博主的github源码。
直接在地址前面加r即可例如:VIDEO_PATH = 'C:\Users\Dell\Documents\Tencent Files\875474597\FileRecv/11.mp4'上图是计算机不能识别的地址,原因是\方向错误自己手动把所有的\改为/或者VIDEO_PATH = r'C:\Users\Dell\Documents\Tencent Files\8754745
自动驾驶模块位于模型预测控制工具箱中的自动驾驶,主要有车道保持辅助系统模块、自适应巡航控制模块和路径跟踪控制系统模块。驾驶场景和传感器模块库。
1.在图片数据集建立的时候,以前模型的图片没有删除掉,我是选中了以前的图片,粘贴了现在需要的图片,所以图片数量搞错了,train和test都是这样,然后我又去检查了一下标签数据集labels,发现数量也不对,把图片和标签数据重新修改之后发现还是报错。用yolov5自建数据集,训练一个模型,出现如下图所示的问题(run pip install wandb to automatically track
断点恢复的应用范围非常非常广。再比如,一个非常常见的情况,假如一开始设置了100个epoch,结果模型训练结束时,Loss还呈现下降的趋势,也就是模型还没有收敛,这种现象有可能就是epoch设置小了,所以可以把第100个epoch训练得到的权值文件当做初始权值文件再训练几个epoch看看,避免重新设置epoch从头训练。预训练权重,顾名思义,就是预先训练好的权重,这类权重是在大型数据集上进行训练的