




- @HHB791829200
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
windows下一般使用linux大家都使用虚拟机进行操作,目前微软已经有wsl2,也可以虚拟出ubuntu系统。同时也希望在windows上将linux输出的结果可视化出来,这以来不需要再两个系统之间来回切换非常方便。在日常的开发中,不想windows和linux两个系统之间来回切换,笔者最近打算所有的环境均在一个系统上完成。为了交互方便考虑还是选择windows下来操作。以上的安装较为简单,读
windows下一般使用linux大家都使用虚拟机进行操作,目前微软已经有wsl2,也可以虚拟出ubuntu系统。同时也希望在windows上将linux输出的结果可视化出来,这以来不需要再两个系统之间来回切换非常方便。在日常的开发中,不想windows和linux两个系统之间来回切换,笔者最近打算所有的环境均在一个系统上完成。为了交互方便考虑还是选择windows下来操作。以上的安装较为简单,读
对图像进行旋转,并且对提取的特征点也完成旋转。记录一下自己碰见的坑。

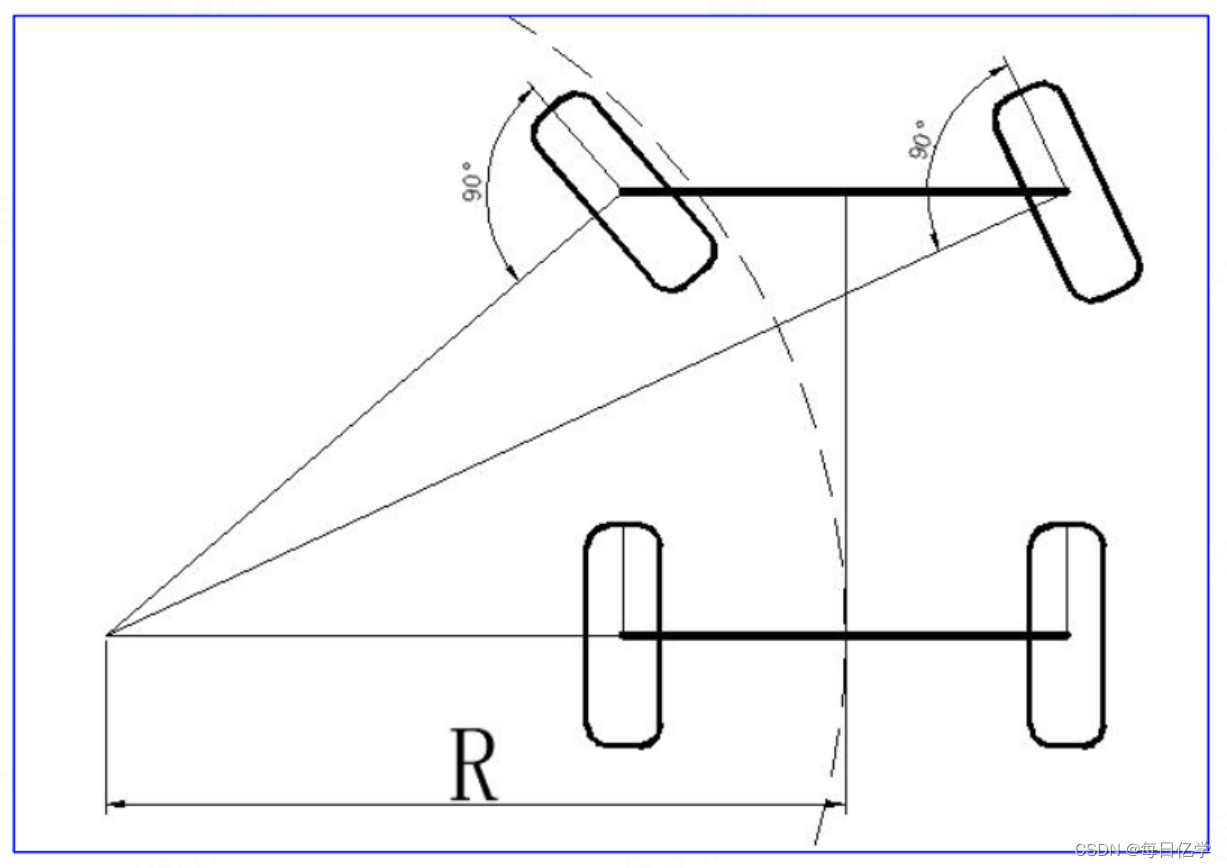
在SLAM中不仅仅只使用视觉和雷达等传感器,小车本身通过编码器计算出小车速度也可以得到小车的位置我们称为轮速里程计。
STM32的TIM的时钟源设置内部是CK_INT时,通过system_stm32f10x.c中SetSysClockTo72()函数可以看到,APB1的预分频系数为2,如果预分频系数为2,则定时器时钟位TIM_CLK=2*32M=72M 。如果修改设置APB1的预分频系数为1,则定时器的频率不变为32M。TIMx_PSC为16位预分频器,可以对TIM_CLK进行1~65535的任意分配。注意这里分
在SLAM中不仅仅只使用视觉和雷达等传感器,小车本身通过编码器计算出小车速度也可以得到小车的位置我们称为轮速里程计。
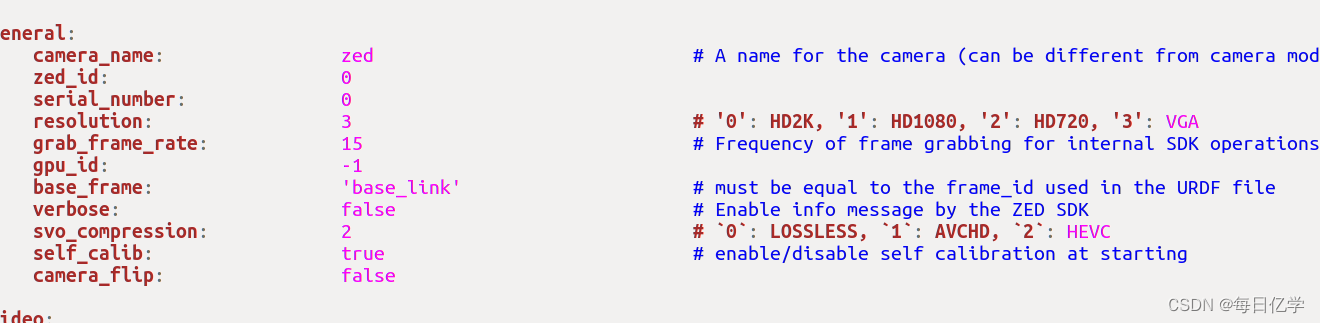
快速实现使用ZED相机的导航
对于第一次接触气缸,不知道如何控制气缸的人十分有帮助。电磁阀可以使用PLC进行控制