- @FRIGIDWINTER
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文全面梳理无人机MAVROS从安装到应用的基础知识,并提供简单的基于MAVROS无人机控制的案例
2023年3月18日,CSIG图像图形企业行活动拉开帷幕,介绍AI未来十年发展新范式...

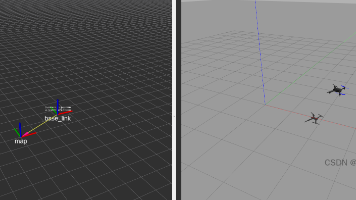
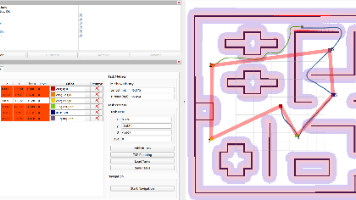
本文介绍基于ROS的机器人智能任务调度仿真平台,轻量化地实现了调度、规划、控制等多种功能,同时框架保证了功能的高度可拓展和可定制
2024世界人工智能大会,快来体验合合信息带来的大模型加速器黑科技

本文介绍基于ROS的机器人智能任务调度仿真平台,轻量化地实现了调度、规划、控制等多种功能,同时框架保证了功能的高度可拓展和可定制
【嵌入式系统】DMA工作原理与常用函数解析1、DMA基本原理直接存储器访问通道(DMA, Direct Memory Access)用来提供在外设和存储器之间或者存储器和存储器之间的高速数据传输。CPU只需初始化DMA,传输本身由DMA控制器来实现而无须CPU干预。DMA挂载在AHB上且数据传输前后不必保存上下文,因此数据可通过DMA高速移动。设置DMA的目的是:通过硬件为存储器和外设间开通若干个
【嵌入式系统】独立看门狗原理+看门狗实验分析1、看门狗模块概述在由单片机构成的微机系统中,由于单片机工作常常会受到来自外界电磁场干扰导致程序跑飞,陷入死循环——即程序正常运行被打断,系统无法继续工作。这种情况下会造成系统陷入停滞状态,发生不可预料的后果。因此出于对单片机运行状态进行实时监测的考虑,产生了一种专门用于监测单片机程序运行状态的模块或芯片,称为看门狗。STM32F10xxx内置两个看门狗
什么是腾讯云Cloud Studio?如何利用腾讯云Cloud Studio进行快速的全栈式开发?本文以快速完成Excel工资自动核算为案例进行说明

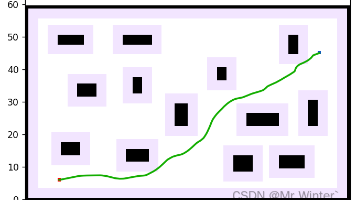
本文介绍了基于Double DQN(DDQN)算法的机器人路径规划方法,该方法设计了包含6种离散速度组合的动作空间,并采用多目标混合奖励函数,结合时间惩罚、距离引导和目标达成奖励来优化路径规划效果。Pytorch仿真结果表明了DDQN算法在大规模栅格地图中规划的可行性,为DRL在机器人运动规划领域的应用提供了实践参考。
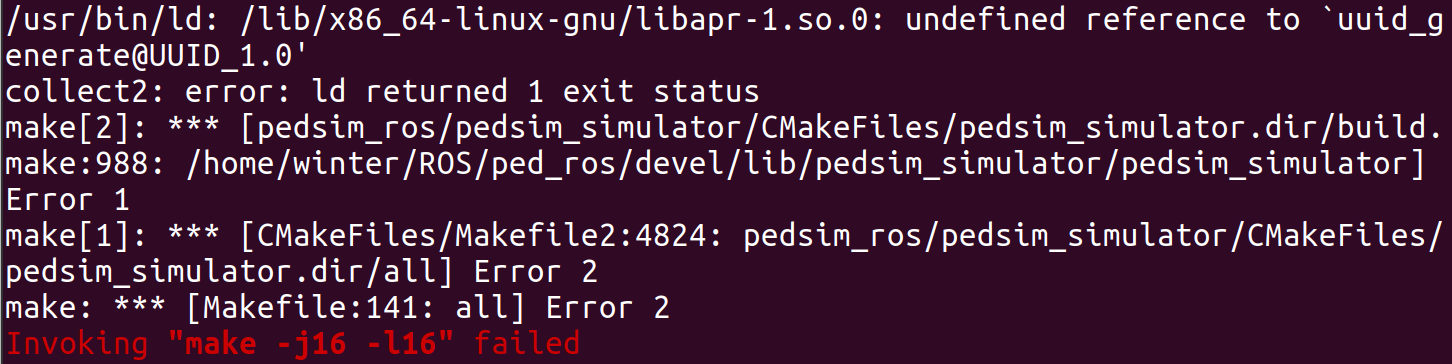
本文探究/usr/bin/ld: /lib/x86_64-linux-gnu/libapr-1.so.0: undefined reference to ‘uuid_generate@UUID_1.0’背后的原因并予以解决