
写文章




- @Bartender_VA11
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
[MOT Challenge]官方生成多目标跟踪算法性能评价指标结果,解决test数据集没有gt文件和官网注册问题
多目标跟踪benchmark MOT challenge的使用流程以及注册流程,解决Test数据集为什么没有gt

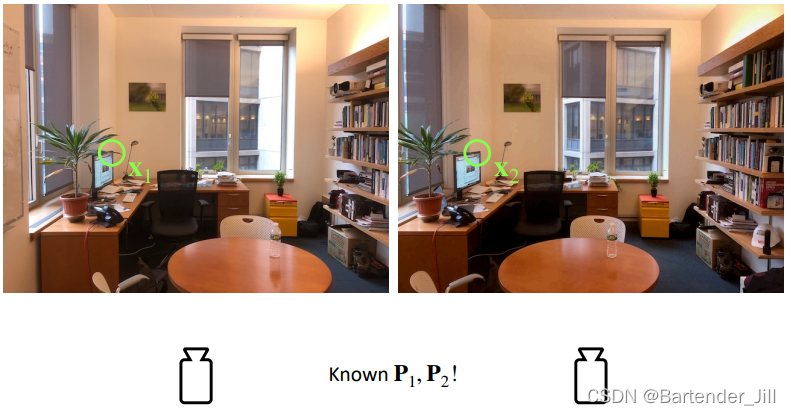
[图形学渲染]大白话推导三维重建(二)-对极几何(Epipolar Geometry)、基础矩阵(Fundamental Matrix)、八点算法(Eight Point Algorithm)
本章将尽量以通俗易懂的方式推导三维重建中常用到的对极几何和基础矩阵的几个概念,涉及数学公式较多但并不困难,如有错误,欢迎指出。书接上回:[图形学渲染]大白话推导三维重建(一)-摄像机内参外参、世界坐标转换、3D物体投影、单双目摄像头、视差上文我们已经明白了3D空间中的一个点 Xw = [X, Y, Z]是如何变换到 2D图像的一个像素点 x = [x, y]即,将世界坐标系下的一个3D点Xw先左乘
CUDA通俗易懂教程(一):从零开始用C++ CUDA搭建一个卷积神经网络(LeNet),了解神经网络各个层背后算法原理
用C++ CUDA实现CNN神经网络LeNet教程

[Unity VR报错解决]Unity.IL2CPP.Bee.BuildLogic.ToolchainNotFoundException: IL2CPP C++ code builder
个人已经安装了相关SDK和通用平台工具了但还是报以下错误。

CUDA通俗易懂教程(一):从零开始用C++ CUDA搭建一个卷积神经网络(LeNet),了解神经网络各个层背后算法原理
用C++ CUDA实现CNN神经网络LeNet教程
[图形学渲染]大白话推导三维重建(二)-对极几何(Epipolar Geometry)、基础矩阵(Fundamental Matrix)、八点算法(Eight Point Algorithm)
本章将尽量以通俗易懂的方式推导三维重建中常用到的对极几何和基础矩阵的几个概念,涉及数学公式较多但并不困难,如有错误,欢迎指出。书接上回:[图形学渲染]大白话推导三维重建(一)-摄像机内参外参、世界坐标转换、3D物体投影、单双目摄像头、视差上文我们已经明白了3D空间中的一个点 Xw = [X, Y, Z]是如何变换到 2D图像的一个像素点 x = [x, y]即,将世界坐标系下的一个3D点Xw先左乘
CUDA通俗易懂教程(一):从零开始用C++ CUDA搭建一个卷积神经网络(LeNet),了解神经网络各个层背后算法原理
用C++ CUDA实现CNN神经网络LeNet教程