登录社区云,与社区用户共同成长
邀请您加入社区
C# 结合 XAML 用于界面设计,支持MVVM(Model-View-ViewModel)等分离关注点的设计模式,促进了UI与业务逻辑的解耦,提高了代码的可测试性与可扩展性,是现代桌面应用开发的高效实践。在现代软件开发架构中,C# 凭借其强大的类型系统、卓越的性能和成熟的生态系统,已成为构建高性能、高可靠性企业级后端服务(如微服务、Web API 和分布式系统)的首选语言之一。在游戏开发领域,C
C++逆向工程从二进制到源代码的解析之旅,是一场结合了耐心、细致逻辑推理和深厚技术功底的挑战。它没有一成不变的公式,更多地依赖于分析者的经验和对系统底层原理的理解。尽管完全自动地恢复出原始源代码在目前仍是不现实的,但通过熟练运用工具和系统的分析方法,我们足以深入理解任何二进制程序的内部工作机制,实现从黑暗中的摸索到豁然开朗的转变。这条路既是对技术的锤炼,也是对思维能力的极大提升。
PHP Tools:提升PHP开发效率的利器。s无疑是提升开发效率的不二之选。
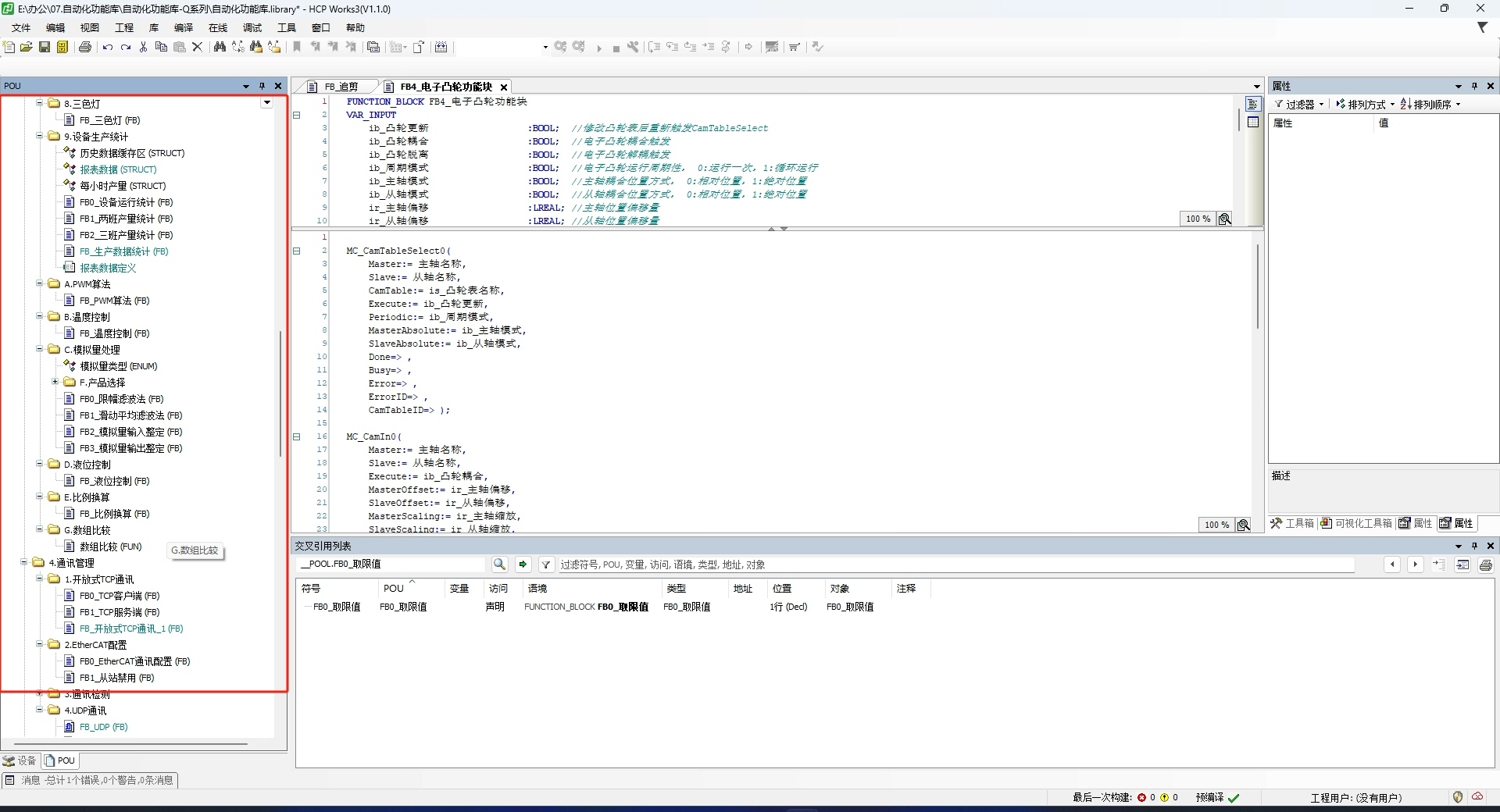
最近有个做包装机的哥们,直接把我们的状态机模板和第三方视觉库对接,三天就搞定了以前要两周的开发任务。工业自动化这行干久了,总有几个让人头秃的瞬间:每次项目都要重新造轮子,设备联调时发现程序结构千奇百怪,新同事接手代码就像在破译外星密码...直到去年我们团队把CODESYS开发框架彻底重构,现在终于能笑着写PLC程序了。最骚的是存储指针可以指向SD卡、数据库甚至云平台,想存哪就存哪,比瑞士军刀还灵活
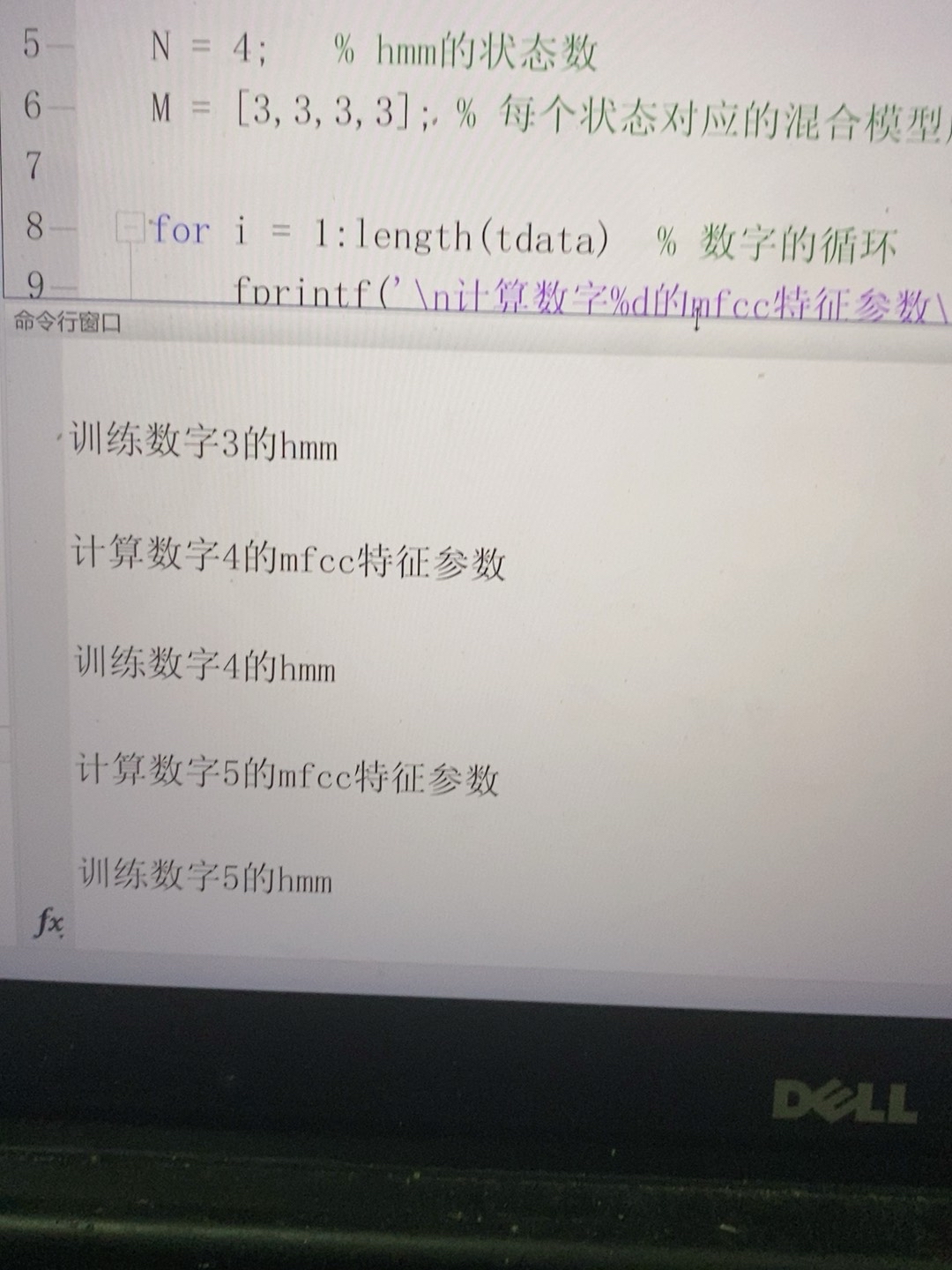
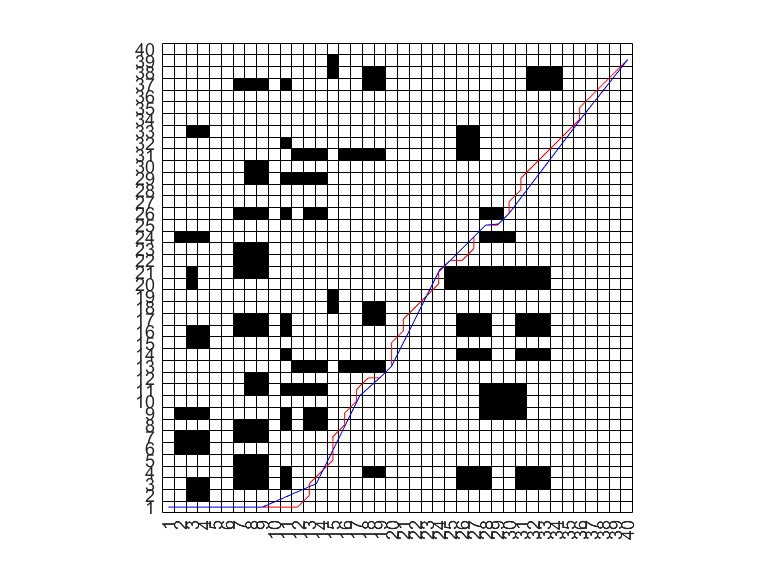
基于隐马尔可夫模型HMM的孤立字语音识别Matlab代码模板在语音识别领域,隐马尔可夫模型(HMM)占据着重要的地位。今天咱就来聊聊基于HMM的孤立字语音识别的Matlab代码模板,看看它是如何运作的。
Keras采用模块化设计,提供直观的接口,使研究人员和工程师能够快速实现从简单的全连接网络到复杂的卷积神经网络(CNN)和循环神经网络(RNN)等各种模型。损失函数则衡量模型预测值与真实值之间的差距,是模型优化的目标。通过遵循这些步骤和最佳实践,开发者可以高效地利用TensorFlow和Keras构建、训练和部署各种深度学习模型,从简单的概念验证到复杂的生产级应用。fit方法返回一个History
摘要:Amazon Lumberyard是一款免费开源的3A级游戏引擎,由亚马逊开发,提供无授权费、无收入分成的商业模式。深度集成AWS云服务,支持一键部署全球服务器、实时运营和Twitch直播功能。拥有次世代画质渲染能力,支持PC、主机、移动及VR多平台发布。开源特性允许开发者深度定制引擎,并享有丰富官方资源和活跃社区支持。该引擎降低了开发门槛,特别适合中小团队创新项目,是结合云端算力与高端游戏
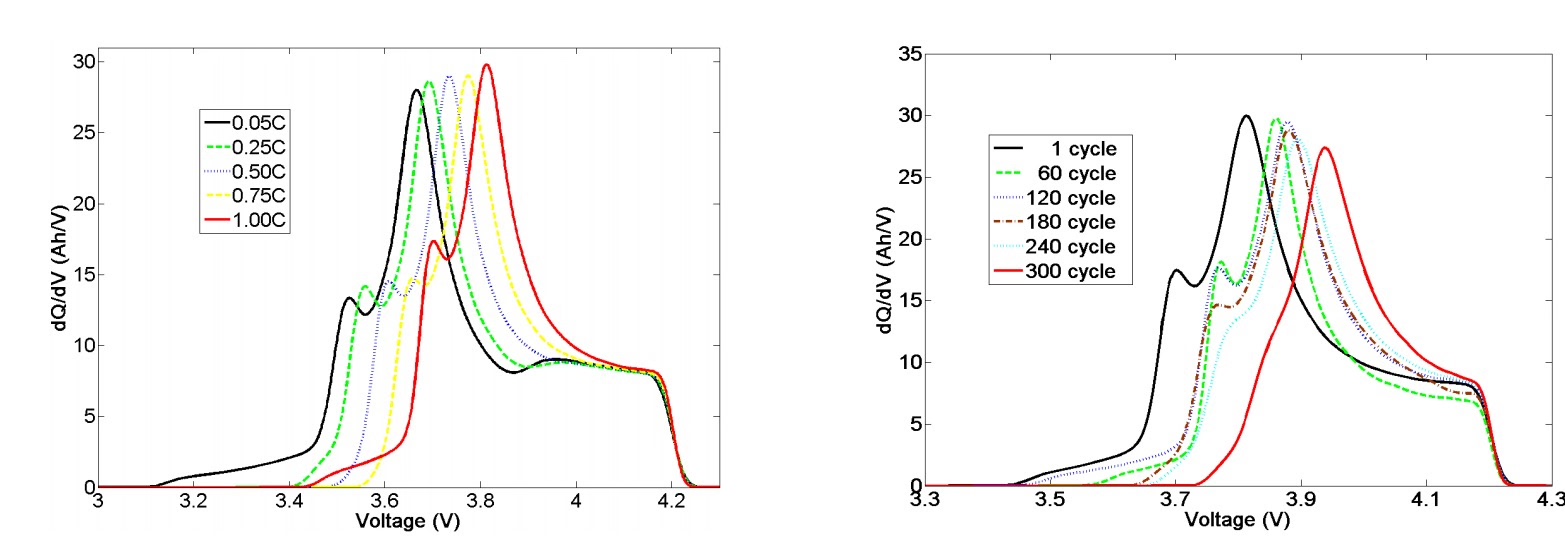
基于增量容量分析(ICA分析)和差分电压分析(DVA分析)的锂离子电池SOH和RUL预测。包括对原始数据的处理、滤波、绘制IC和DV曲线、提取特征、预测模型的构建。
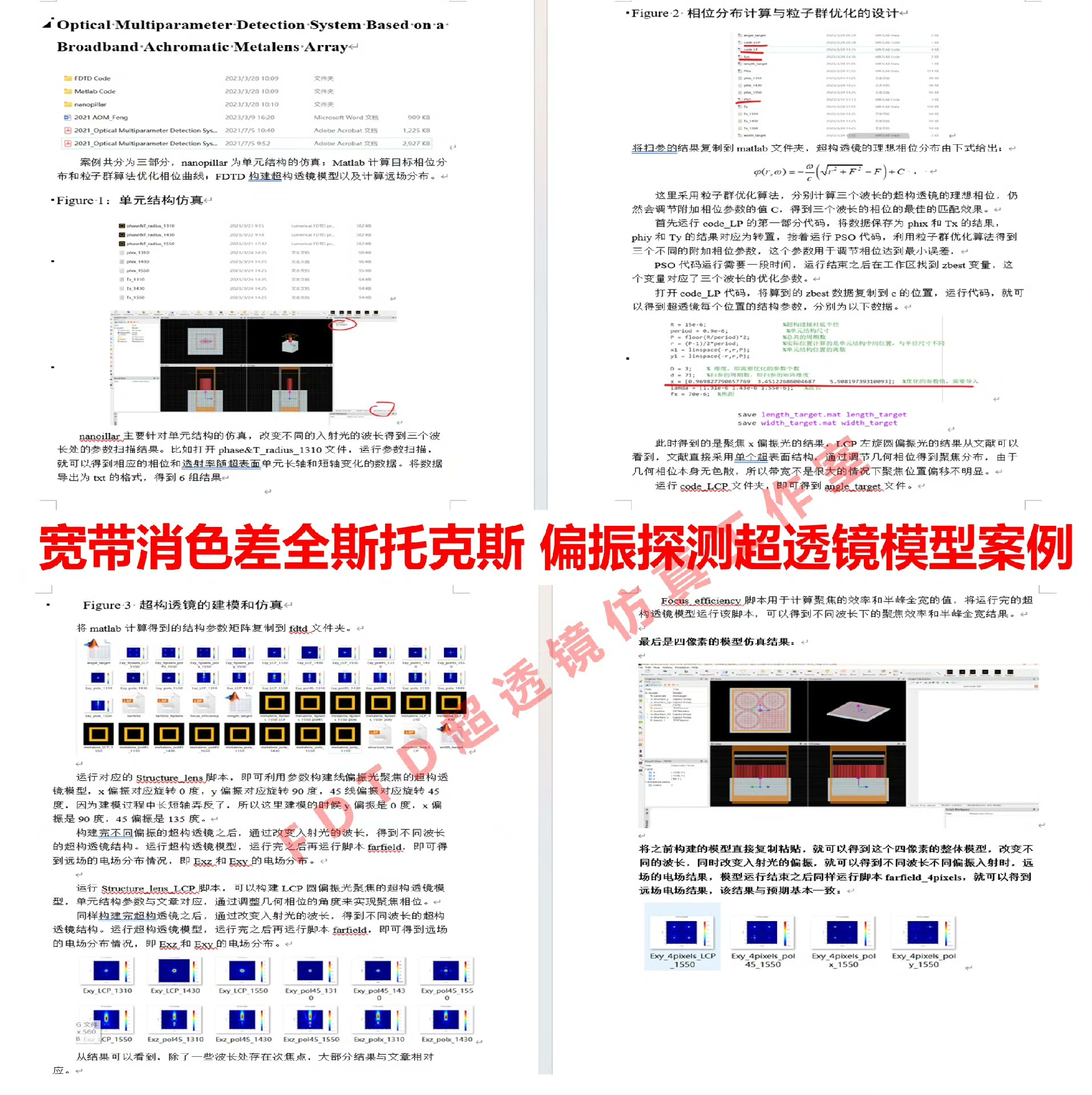
硅基超构透镜的设计总绕不开色差和偏振敏感这对冤家。案例内容:主要包括椭圆硅纳米柱的单元结构扫参模型和结果,不同波长的相位参数,粒子群优化算法来优化消色差参数,构建线偏振消色差超透镜和圆偏振超透镜模型,以及单独的偏振敏感超透镜宽带消色差结果和四偏振态集成的超透镜的偏振探测结果;案例内容:主要包括椭圆硅纳米柱的单元结构扫参模型和结果,不同波长的相位参数,粒子群优化算法来优化消色差参数,构建线偏振消色差
算法不再仅仅是冰冷的工具,它开始学会感知情感的微妙涟漪,理解隐喻的深层结构,甚至模仿那名为“灵感”的闪烁火花。我们与机器的关系,从简单的指令与执行,转变为一种共创的舞步——人类提供意图、审美与生命的厚度,机器则贡献其无尽的计算力、庞大的知识库与不受传统束缚的想象力。当机器能够写出动人的诗篇,创作的定义、版权的归属、艺术的独特性都将被重新讨论。但无论如何,当AI开始写诗,它预示的不是机器的胜利,而是
本项目基于TCN-Transformer融合架构,实现了一套完整的时序预测解决方案,具备高精度、易扩展、工程化的特点。技术层面:融合TCN与Transformer的优势,解决“局部特征+全局依赖”的双重建模问题。工程层面:模块化设计、超参数集中管理、完善的评估体系,便于快速适配不同时序预测场景。
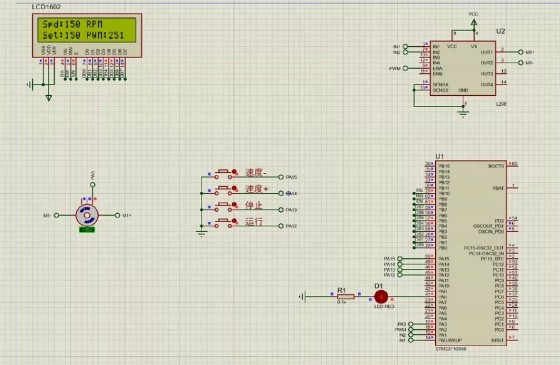
同时,报告还提供了丰富的参考资料和扩展资源,方便用户进一步学习和研究。该系统在STM32F103R6主控芯片的控制下,通过PID算法实现对直流电机的精确调速,具有较高的精度和稳定性,可以广泛应用于各种自动化控制系统中。同时,为了方便用户进行仿真和测试,我们还提供了Proteus仿真文件,并在33页的报告中详细介绍了系统的设计思路和实现过程。同时,为了方便用户进行仿真和测试,我们还提供了Proteu
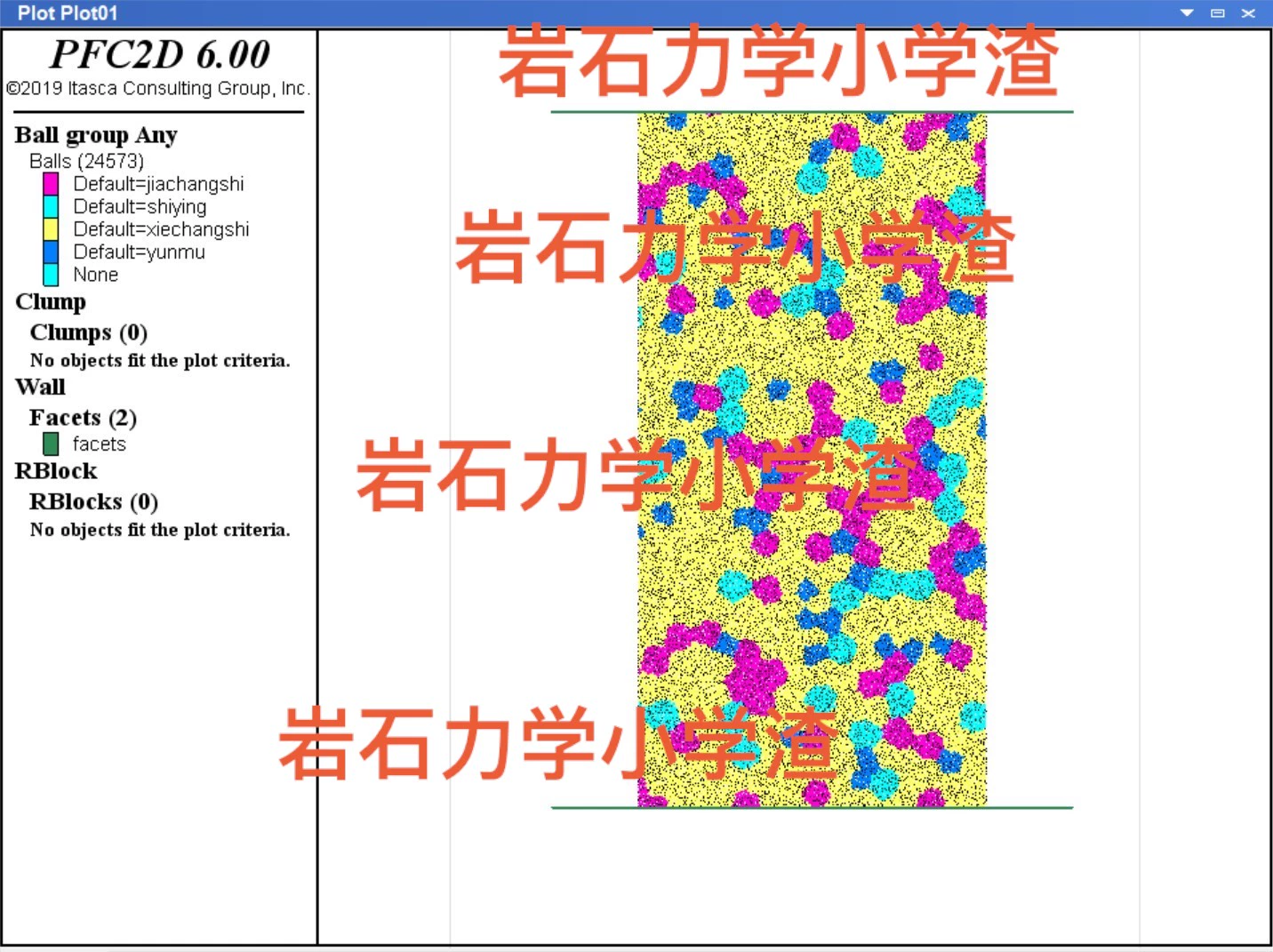
本文档针对岩石矿物GBM(Grain-Based Model,基于颗粒的模型)的PFC(Particle Flow Code)模拟代码进行功能解析。该代码体系共包含7个核心文件,遵循Potyondy. D. 2010提出的GBM模型理论,通过多步骤的颗粒生成、几何建模、力学参数赋值与加载模拟,实现岩石矿物在受力条件下的力学响应与断裂行为模拟,为岩石力学领域的数值分析提供标准化的计算流程。
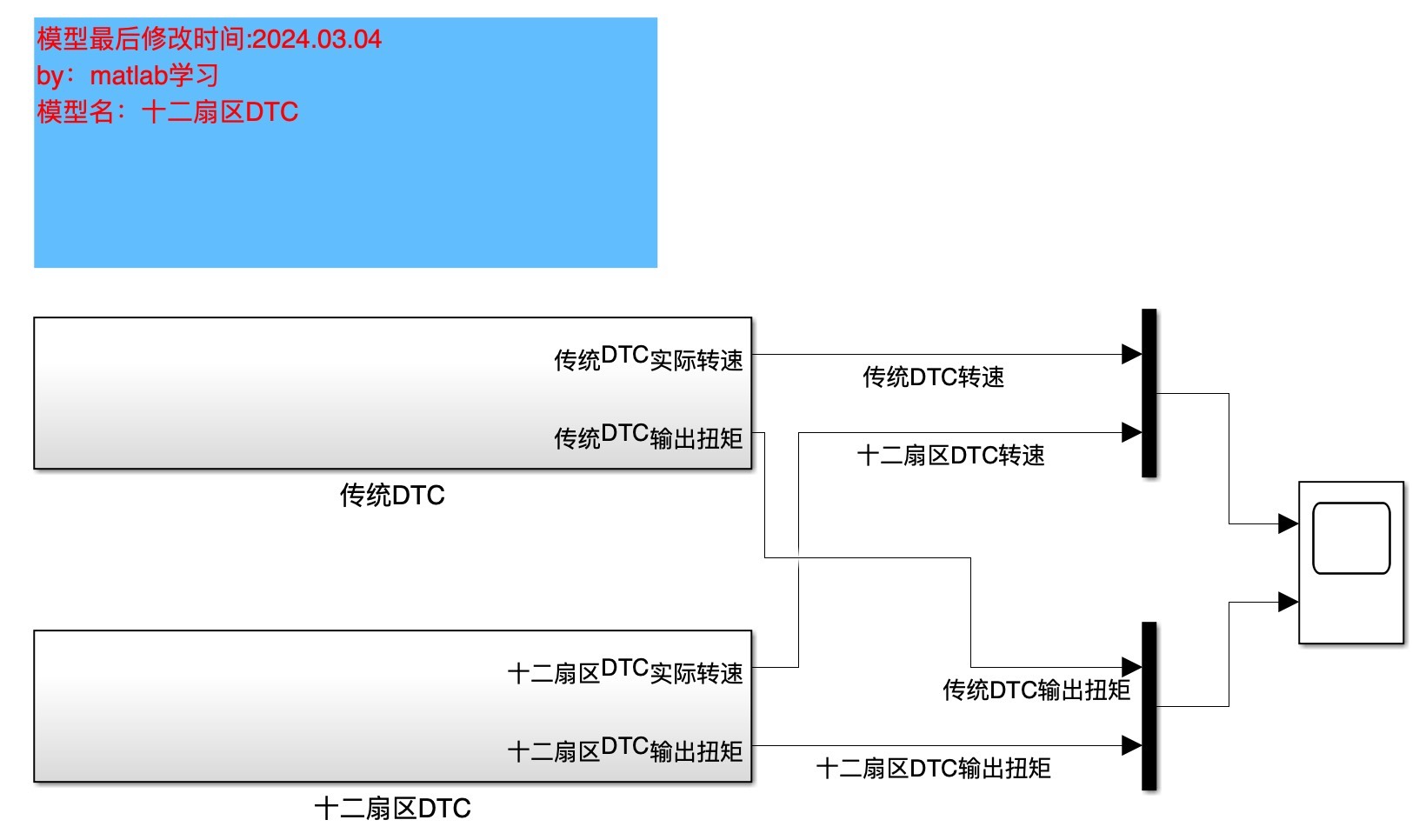
十二扇区直接转矩控制/直接转矩控制改进/改进的异步电机直接转矩控制/DTC改进;simulink搭建的十二扇区异步电机传统直接转矩控制模型,与传统DTC区别在于逆变器开关状态选择与定子磁链所在扇区计算,从传统6个扇区细分为12个扇区,转矩波纹更小;未采用matlabfunction和s函数,适合新手学习,附带一个说明文档;模型可直接运行、可调节,默认发送2023b版本的simulink模型,需要其
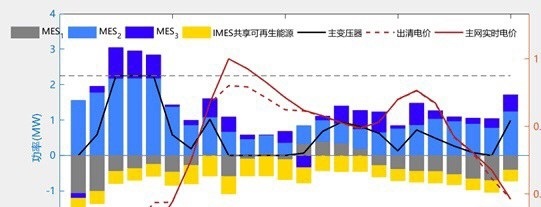
MATLAB代码:基于多时间尺度滚动优化的多能源微网双层调度模型关键词:多能源微网 多时间尺度 滚动优化 微网双层模型 调度参考文档:《Collaborative Autonomous Optimization of Interconnected Multi-Energy Systems with Two-Stage Transactive Control Framework》完全复现。
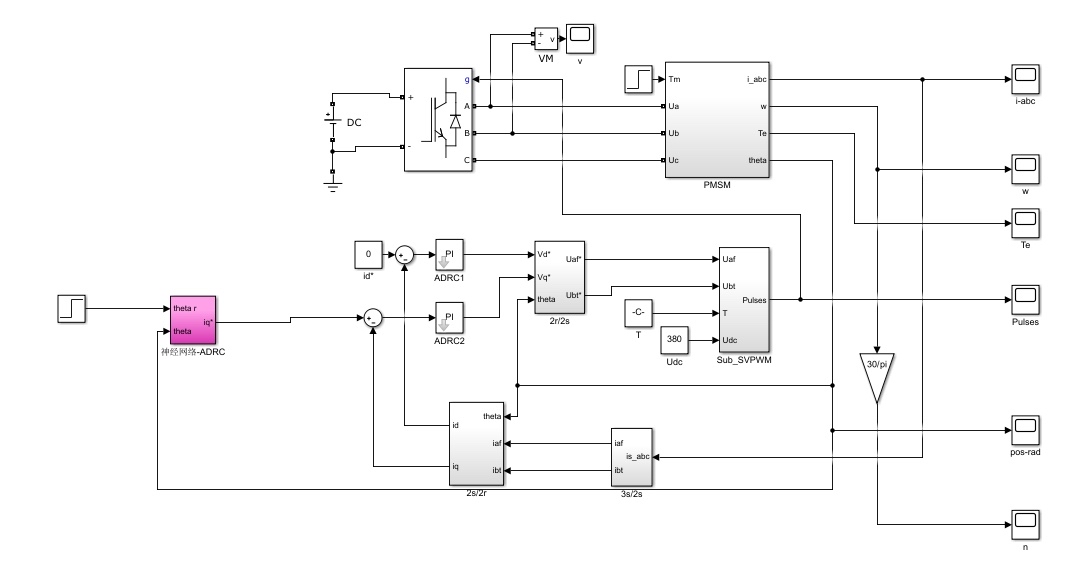
基于永磁同步电机(PMSM)的自抗扰控制(ADRC)与改进的神经网络自抗扰控制的simulink仿真模型,可直接进行对比仿真。自抗扰偏向于无模型控制,控制对象更换后只需要简单调试即可使用。附带有理论参考资料,可提供指导。采用三闭环控制。经过改进效果非常好。在电机控制领域,永磁同步电机(PMSM)因其高效、节能等诸多优点,应用愈发广泛。而如何实现对PMSM精准且鲁棒的控制,一直是研究的热点。
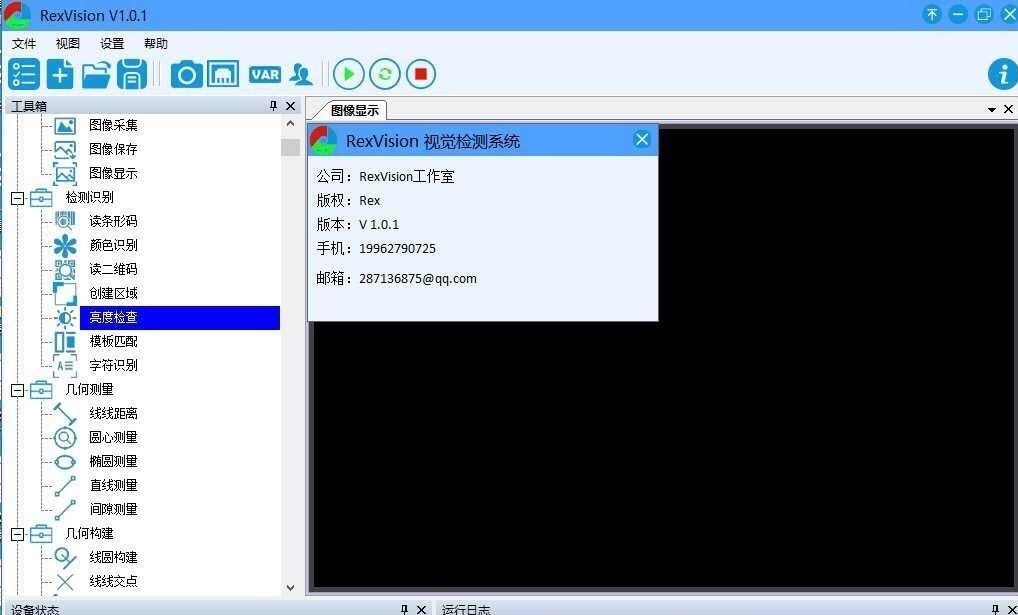
这就意味着,从生产线上的零部件检测,到精准的机械操作定位,它都能发挥大作用。机器视觉框架源码,到手vs2019可以直接编译、视觉检测、AOI视觉检测、机械手定位、点胶机、插件机、激光切割机、视觉螺丝机、视觉贴合机、激光焊接机、视觉裁板机……这套源码在到手之后,在VS2019里就能直接编译,简直不要太方便,对咱们开发者来说,时间就是金钱呐,省去了各种环境配置的麻烦事儿。这种搭配真的很巧妙,C#大家都
无人船和无人车的路径规划本质上是个多目标优化的活,既要省电又要跑得近。最后忠告:仿真时别忘了给虚拟机器人加运动学约束,现实中的电机加速度可不会瞬移——这教训值三块烧掉的电机驱动板。但要注意交叉后必须重新排序路径点,否则会出现"瞬移"bug——别问我怎么知道的,上周机器人在实验室表演量子跃迁把导师咖啡杯撞飞了。这里roulette_select函数要实现经典的轮盘赌算法,注意要处理适应度归一化的问题
最后放个大招:正逆解验证黄金法则——正解后再逆解,误差超过1e-6就得查DH参数表是不是手滑填错行。6轴机器人运动学,matlab版本正逆解详细计算过程,CPP版本正逆解,labview版本正逆解。6轴机器人运动学,matlab版本正逆解详细计算过程,CPP版本正逆解,labview版本正逆解。每个关节的变换矩阵连乘就是总正解,这坨矩阵乘法建议手推一遍,保你DH参数理解升仙。5.学习6轴运动学,如
然而,索引并非没有代价,它会降低数据插入、更新和删除的速度,因为索引本身也需要维护。通过使用EXPLAIN(或在某些数据库中是EXPLAIN ANALYZE)命令,可以获取查询的执行计划,从而了解数据库是如何处理你的SQL语句的。识别出执行计划中的性能瓶颈,例如昂贵的全表扫描,是进行针对性强优化的第一步。避免使用SELECT ,而是明确指定需要的列,这可以减少网络传输的数据量和数据库的I/O操作。
lumberyard
——lumberyard
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 AI Agent技术社区
AI Agent技术社区


 DAMO开发者矩阵
DAMO开发者矩阵

 腾讯云开发者社区
腾讯云开发者社区
 开源鸿蒙跨平台开发者社区
开源鸿蒙跨平台开发者社区
 九章云极普惠算力
九章云极普惠算力

 AtomGit开源社区
AtomGit开源社区

 AI硬件创业社区
AI硬件创业社区

 魔乐社区
魔乐社区

 2048 AI社区
2048 AI社区
