- @uWvvJWldyYUZ
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
该系统采用 VGG-19 深度学习模型,能够识别包括一次性快餐盒、牙签、果皮、蛋壳等在内的 20 种垃圾类型,并将垃圾分类为厨余垃圾、可回收物、有害垃圾或其他垃圾,同时提供详细的分类说明、垃圾危害介绍和回收建议。MATLAB R2024a 或以上版本支持跨平台操作( Windows、macOS ),用户可以方便地使用该系统进行垃圾分类。通过深度学习模型和图像预处理技术的结合,系统不仅提高了识别精度
基于maxwwell设计的经典750W,3000RPM 内转子 私服电机,直流母线310.10极9槽,外径76轴向长度56.7 ,2.37Nm,转矩脉动0.4%,齿槽转矩小,转矩脉动小, 永磁同步电机(PMSM)设计案例,私服电机用 ,该案例已制作样机,方案成熟,运行稳定,可直接用于生产。最近在研究永磁同步电机(PMSM),发现了一个基于 maxwwell 设计的超棒案例,忍不住来和大家唠唠。

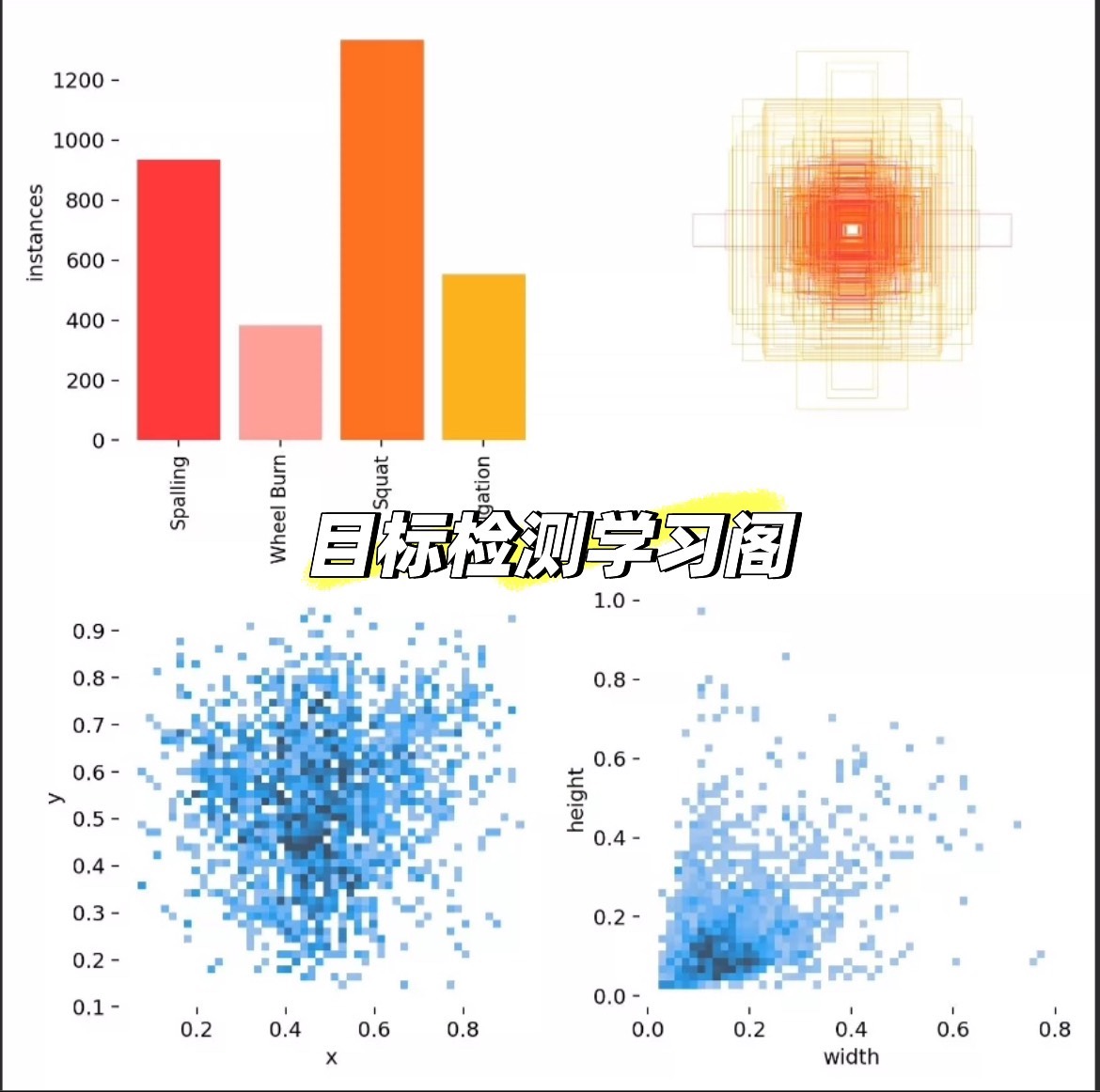
本文介绍了一种基于Yolov8的铁轨轨道缺陷检测方法,通过对已提供的数据集进行训练和测试,我们可以准确地检测出脱落、轮烧、压陷和磨耗等轨道缺陷。本文将介绍一种基于Yolov8的铁轨轨道缺陷检测方法,该方法利用已提供的数据集进行模型训练,并针对脱落(Spalling)、轮烧(Wheel Burn)、压陷(Squat)和磨耗(Corrugation)等轨道缺陷进行检测。本次研究使用的数据集包含共227
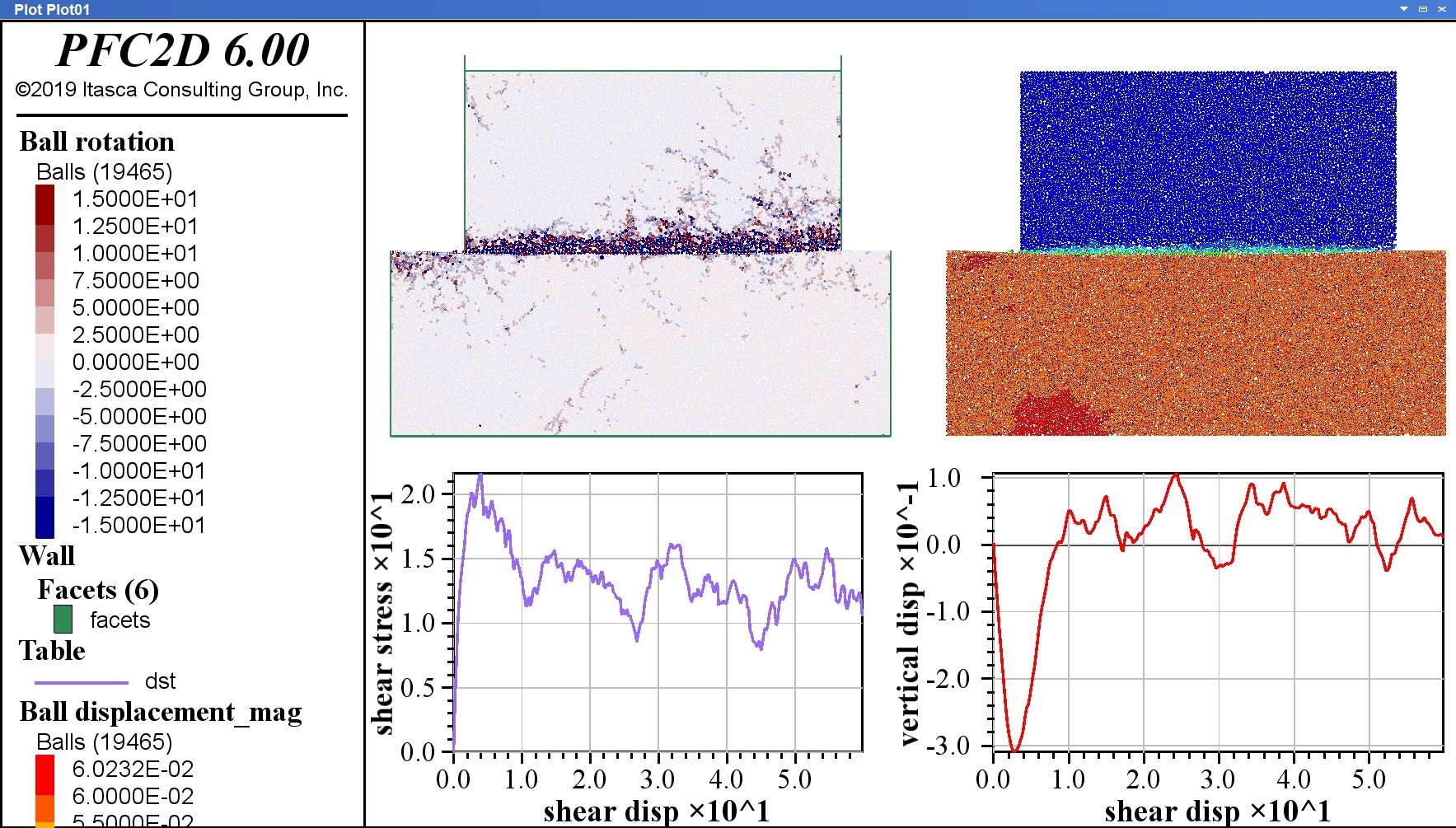
Itasca PFC 颗粒材料与织物交界面直剪模拟案例大型直剪试验 织物采用cb模型可设置织物与颗粒材料的接触属性在岩土工程等诸多领域中,研究颗粒材料与织物交界面的力学特性至关重要。而通过 Itasca PFC 软件进行模拟,能为我们提供直观且深入的分析视角。今天就来聊聊这个颗粒材料与织物交界面直剪模拟案例。
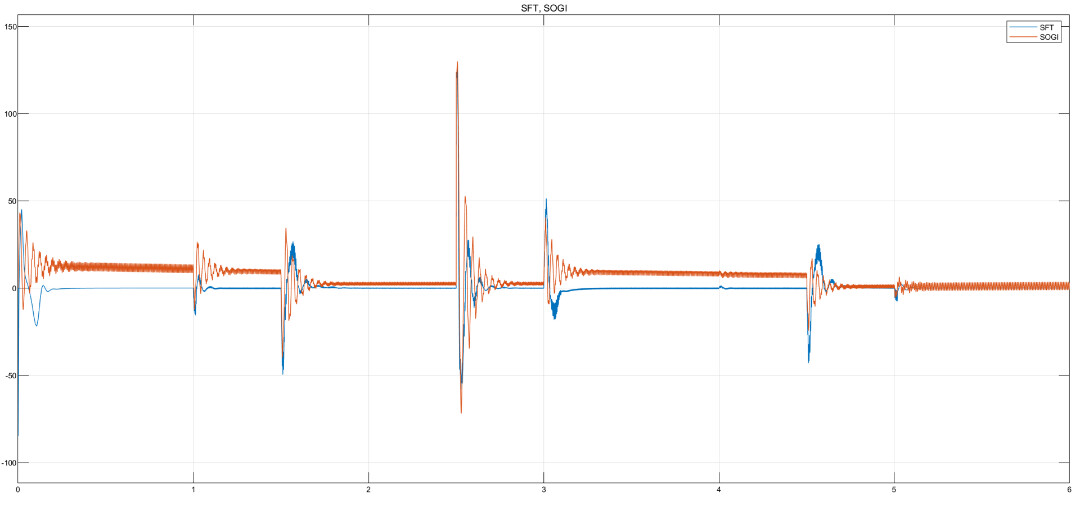
Single_Phase_SFT_VS_SOGI_PLL:基于MATLAB/Simulink的SFT与SOGI单相锁相环仿真模型。SFT利用滑动傅里叶变换作为鉴相器,正交信号通过受控的传输延迟产生,延迟由频率进行调整,对于频率变化具有自适应性,在保持恒定采样频率的同时具有更好的谐波抑制和直流偏移抑制;SFT与二阶广义积分器(SOGI-PLL)进行对比仿真。仿真条件:MATLAB/Simulink
二次开发最坑的是插件升级冲突,建议在extends目录里搞继承开发。最近在折腾FastAdmin+Shopro的uniapp分销商城时发现,有些功能得自己动手才能满足运营需求。改完记得在后台权限管理里把新加的功能路由配上,不然运营妹子又要炸毛。这套组合拳打下来,基本上能满足90%的分销定制需求,剩下的10%就看客户钱包厚度了。数据库层面得注意分佣记录表的扩展性。缓存策略也得优化,分销配置这种高频读

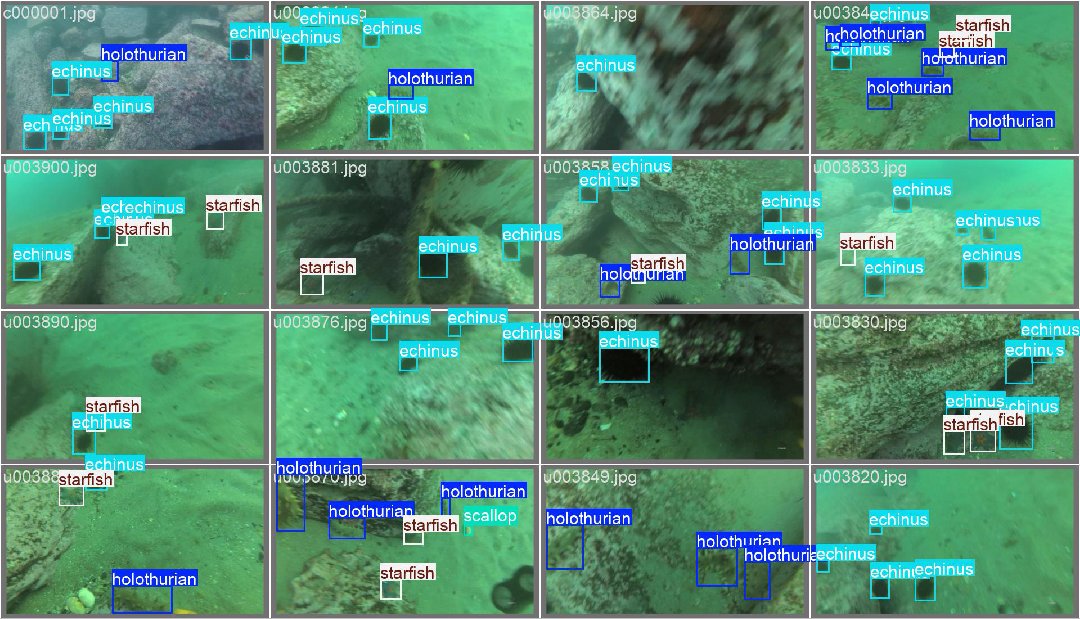
这次我们选用YOLOv8s模型搭配URPC2021数据集,针对海参、海胆、扇贝、海星四类生物构建检测系统。该数据集包含:海参“holothurian”,海胆“echinus”,扇贝“scallop”和海星“starfish”等四类。该数据集包含:海参“holothurian”,海胆“echinus”,扇贝“scallop”和海星“starfish”等四类。项目采用yolov8s进行训练,使用pyq
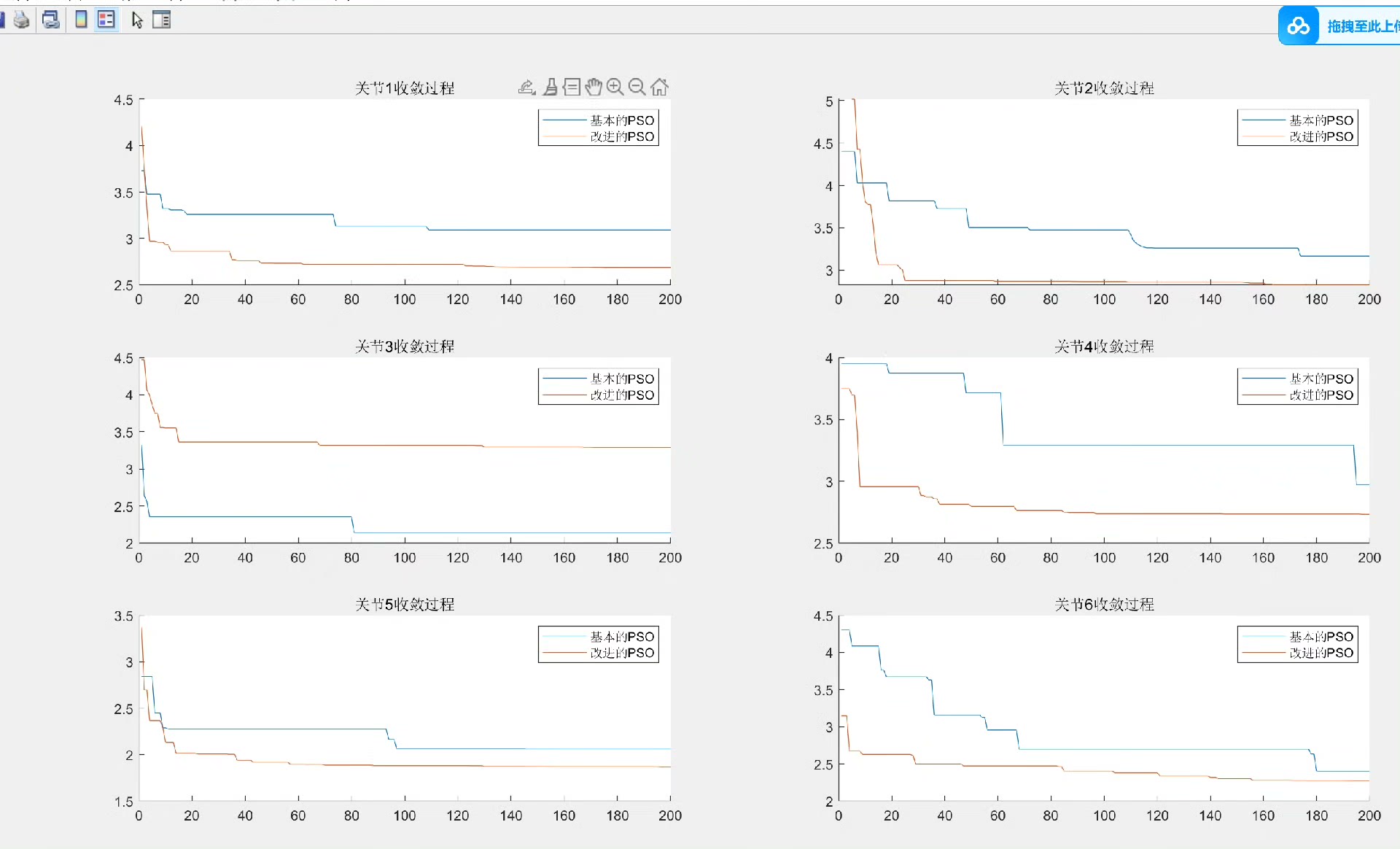
六自由度机器人matlab 3-5-3多项式改进粒子群时间最优轨迹规划算法。带有速度约束,加速度约束,代码写成函数形式,参数易改。353时间最优机械臂关节空间轨迹规划,改进粒子群与普通粒子群对比。纯手写代码,带有中文注释,非常适合学习,代码质量很高。不要拿着那些csdn辣鸡代码来比适用于各种工业机械臂的轨迹规划算法,最优时间优化,六轴机械臂,scara机械臂,等等matlab,源代码,质量很高出图
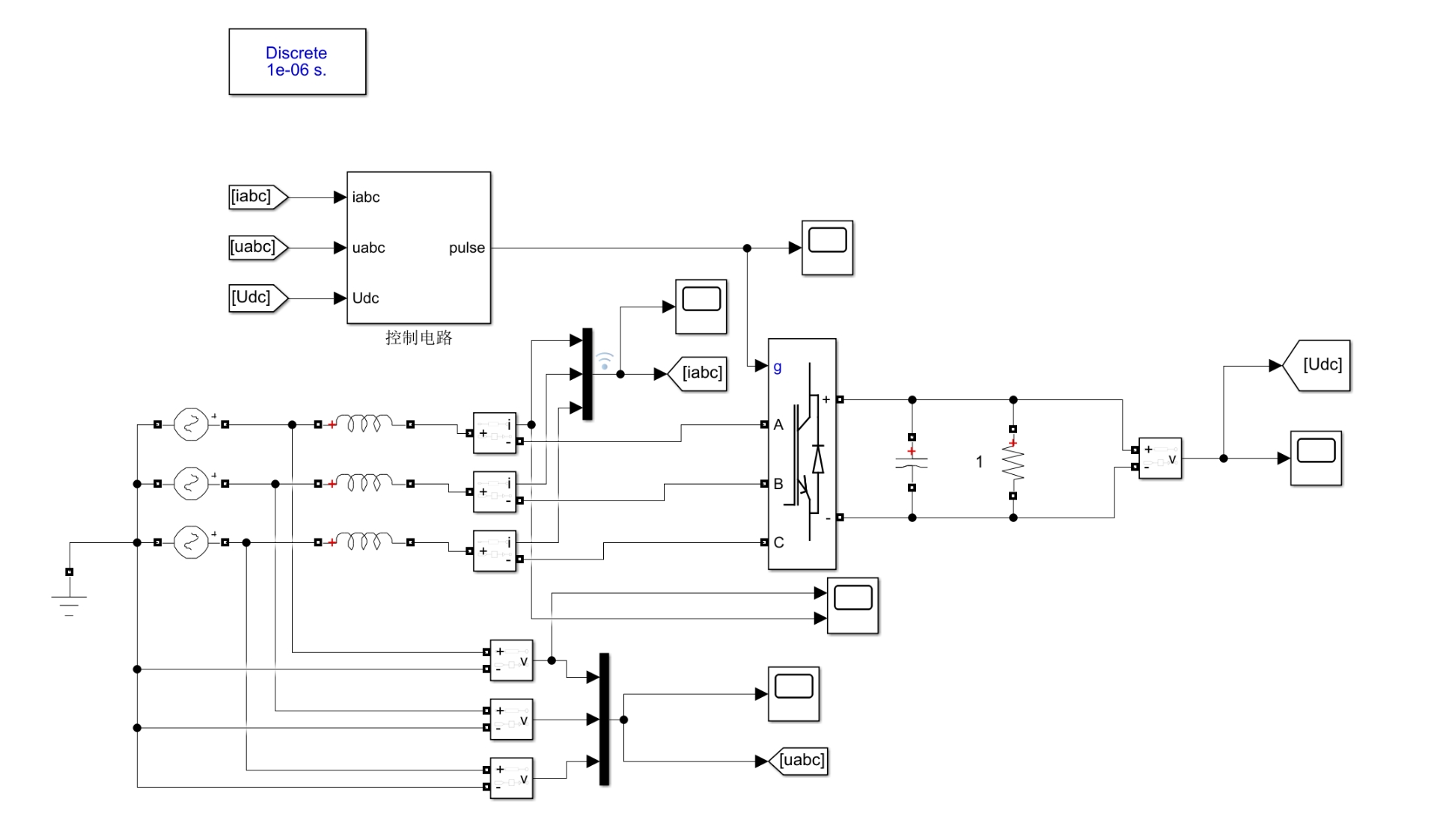
先上硬货——模型架构核心是三相两电平拓扑,交流侧接220V/50Hz,直流母线目标760V。包括基于开关表的直接功率控制,滞环电流控制,有限集模型预测直接功率控制,有限集模型预测电流控制,均为输入三相对称交流电,220V/50Hz,直流侧输出760V,且直流输出电压可调。包括基于开关表的直接功率控制,滞环电流控制,有限集模型预测直接功率控制,有限集模型预测电流控制,均为输入三相对称交流电,220V
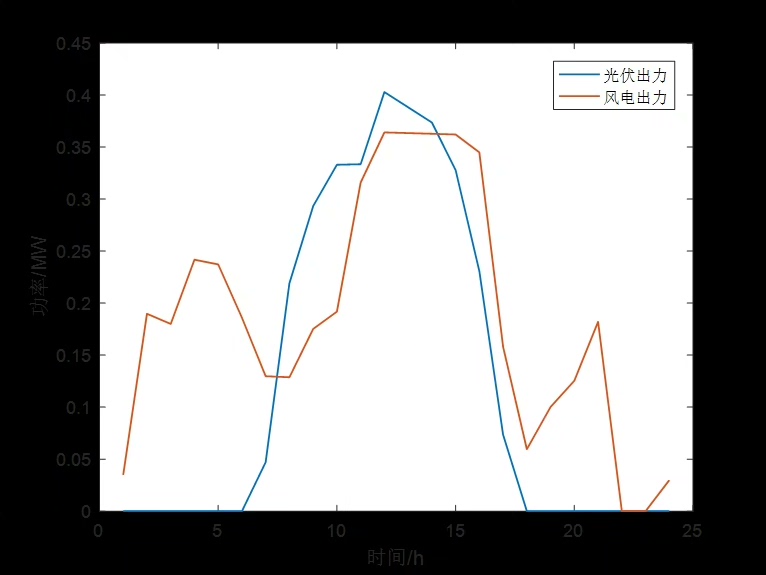
领导层(主博弈方)每天最重要的工作就是调整收购电价λ,这个数值直接决定了楼下那排光伏板业主(从博弈方)愿不愿意把自家屋顶发的电卖给电网。拆开博弈前后的收益对比表,发现三号产消者虽然发电成本最高,却通过精准的发电策略实现了28%的利润增幅。凌晨三点的仿真画面突然弹出一组平滑收敛曲线,我盯着屏幕里跳动的粒子群参数,终于逮住了那个藏了三天的纳什均衡点。这些代码不仅复现了文献中的数学模型,更揭示了电力市场