




- @weixin_52531852
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
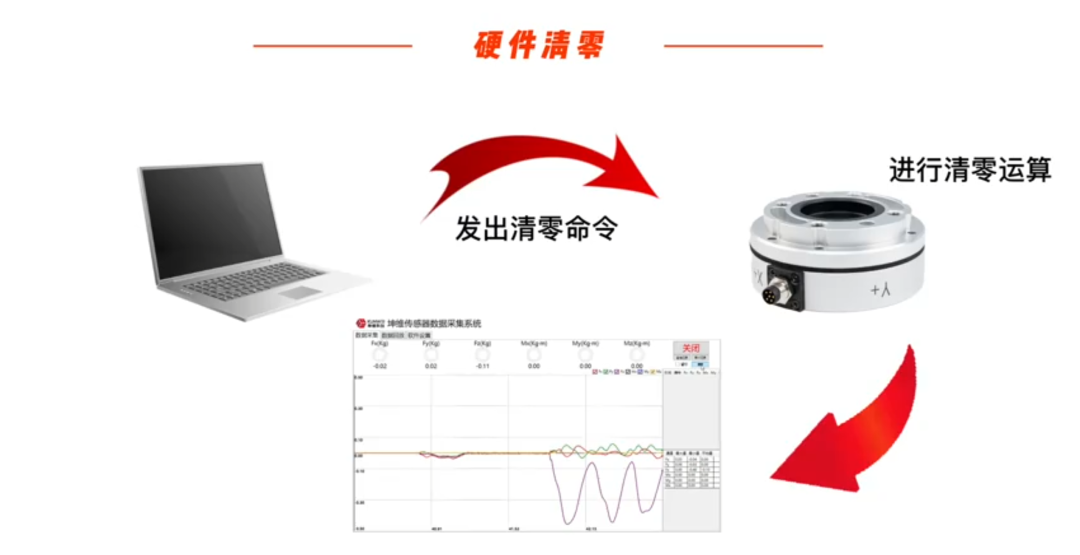
作为参考,实际的力传感器是非理想化的,它的数据总是一直在小幅波动变化,如果仅取当下时刻的值作为参考,很有可能这个参考值是偏离过去一段时间内的均值的,所以我们需要连续采集一小段时间的数据,这个时间段在几十到一两百毫秒比较合适,然后计算这段时间数据的算数平均值作为参考值。但实际上的传感器不是理想化的,它的输出是基于出厂时的零位状态给出的,它并不清楚自己目前处于什么状态,是平放还是侧放,所以它的输出在用
随着新一轮科技革命和产业变革的加速演进,5G、人工智能、物联网等基础设施日趋完善,无人驾驶、无人机、VR/AR等终端应用技术商业化规模快速增长,而连接新一代信息技术的基础技术与终端应用的——以MEMS为核心智能传感器,正处于爆发阶段。MEMS传感器的设计与制造依赖大规模微纳制造技术,基于此,深圳市微纳制造产业促进会开展MEMS微纳制造系列调研,通过对核心器件市场应用的研究,分析其背后微纳制造技术的

XELA ROBOTICS 发布Uskin 3轴 皮肤触觉传感器
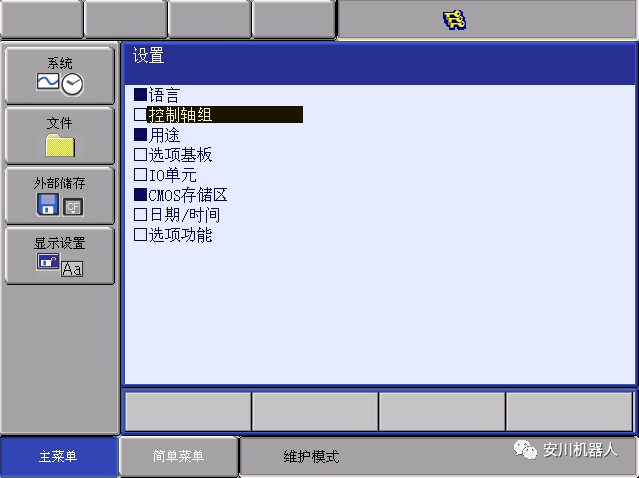
轴操作键分配功能,可将示教编程器[轴操作键]的第7轴 (E+, E-)、第8轴(8+,8-) 设为任意外部轴,不必切换控制组,便可对外部轴进行轴操作。但是请注意只有当前的操作对象是机器人时,可使用通过该功能分配完成的第7轴、第8轴对外部轴进行操作。若第7轴和第8轴设为同一轴(控制组、轴编号相同)。在连接画面中,指定将基准轴的各轴与伺服基板的某个插头点相连接、与接通单元的某一制动器相连接、与某一整流
眼动是通过追踪眼球运动来记录注视点和眼动轨迹的技术,眼动追踪研究的最关注的事件是确定人类或者动物看的地方(“注视点”或“凝视点”),准确来说是通过眼动仪设备进行图像处理技术,定位瞳孔位置,获取坐标,并通过一定的算法,计算眼睛注视或者凝视的点,让计算机知道你正在看哪里,何时看的,为什么看的?眼动仪的工作原理与之对应,首先利用摄像机获取眼部图像,接着通过图像处理得到瞳孔位置(像素坐标),然后将这个位置
轴操作键分配功能,可将示教编程器[轴操作键]的第7轴 (E+, E-)、第8轴(8+,8-) 设为任意外部轴,不必切换控制组,便可对外部轴进行轴操作。但是请注意只有当前的操作对象是机器人时,可使用通过该功能分配完成的第7轴、第8轴对外部轴进行操作。若第7轴和第8轴设为同一轴(控制组、轴编号相同)。在连接画面中,指定将基准轴的各轴与伺服基板的某个插头点相连接、与接通单元的某一制动器相连接、与某一整流
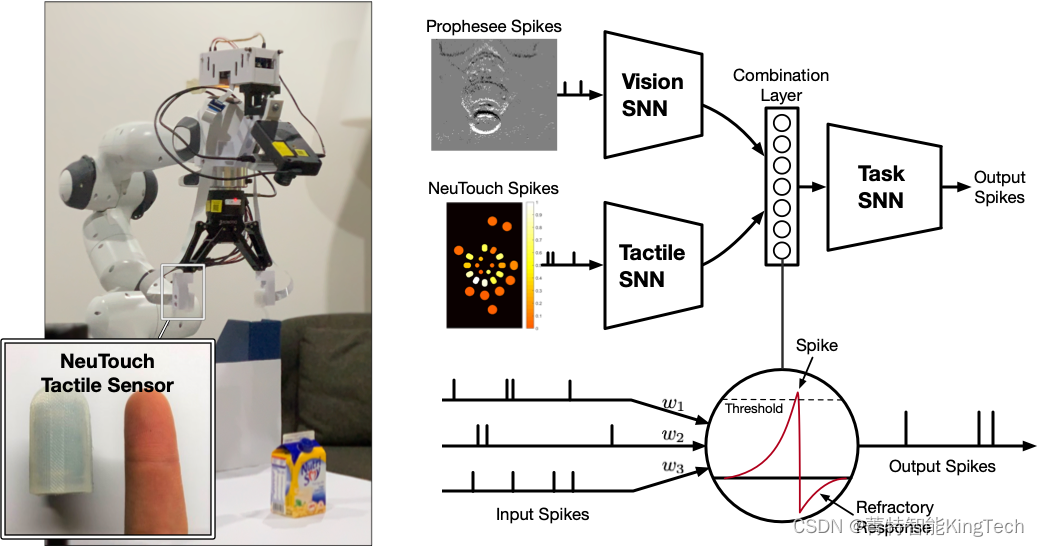
通过神经形态感知和学习实现准确、快速和低功耗的多感官感知机器人的事件驱动视觉触觉感知和学习,Tasbolat Taunyazov★, Weicong Sng★, Hian Hian See, Brian Lim, Jethro Kuan★, Abdul Fatir Ansari★, Benjamin Tee, and Harold Soh★, Robotics: Science and Syste
优傲机器人universal-robots E-SERIES PROFINET 通讯
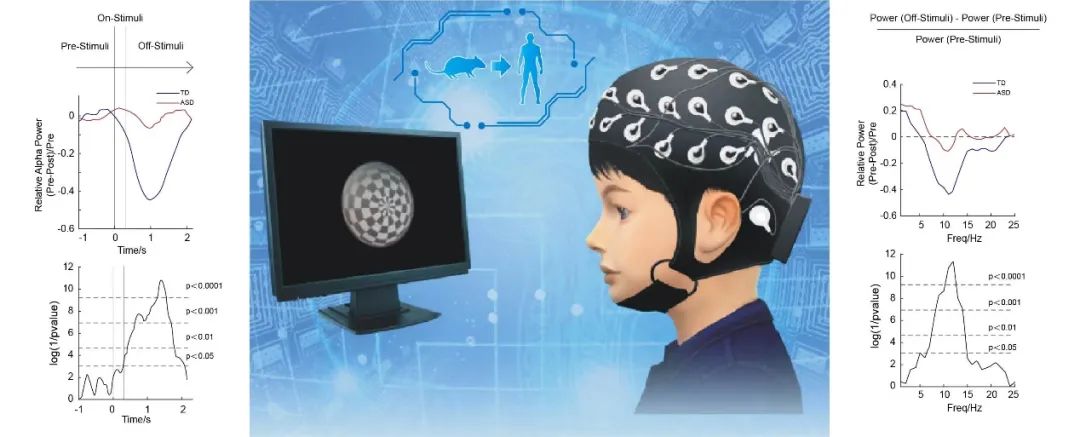
在国际上多次获得殊荣的EMOTIV Epoc X是一个14通道无线脑电图(EEG),设计更符合实际的研究,先进的脑机接口(BCI)应用程序。通过Pure•EEG软件EPOC+能提供密集的记录数组,高品质、原始脑电图数据。
