
写文章




- @qq_50939442
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
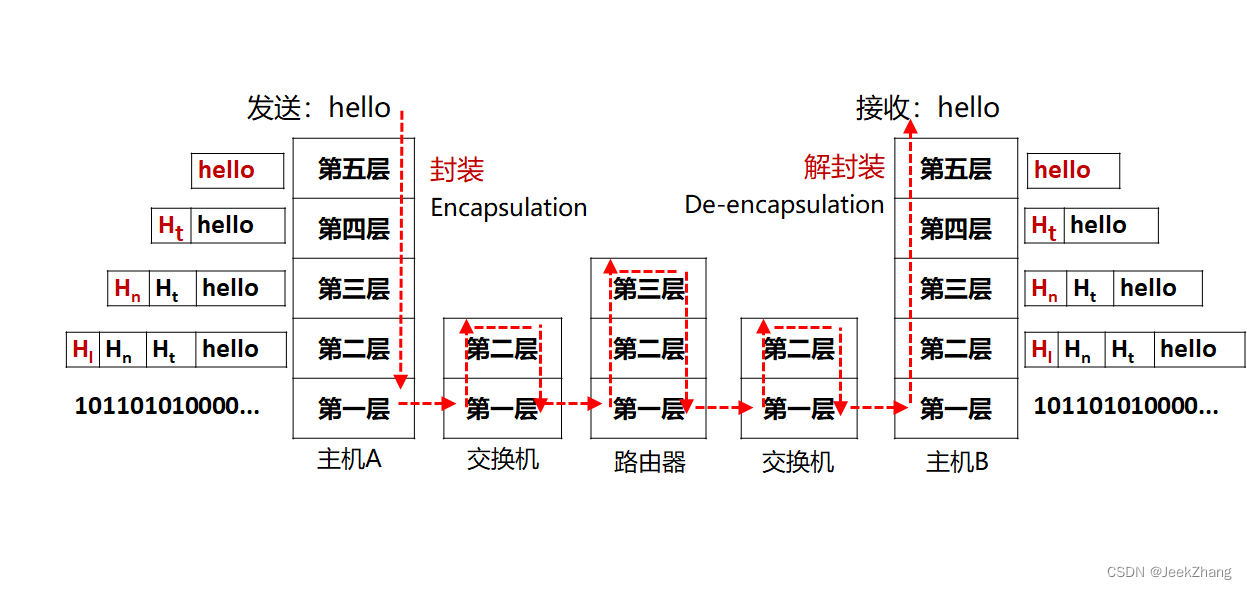
【计算机网络期末复习】
2022秋计算机网络期末复习文档
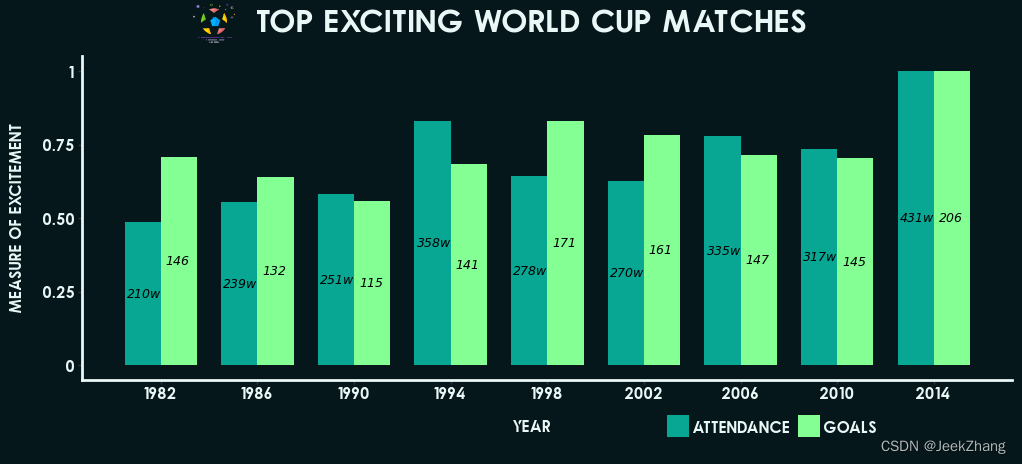
基于条形图的世界杯数据可视化
本文对时下热点内容进行了可视化。先对数据按ggplot的要求读入格式进行了预处理,再依次进行了基本视图绘制,并在此基础上做了一系列的优化,包括数据标签、轴的刻度与标签、标题、配色、图例、主题和图片的添加与调整。最后,得到了一张美观、简洁且具有科技感的世界杯精彩程度双直方图。
【计算机网络期末复习】
2022秋计算机网络期末复习文档
《Database System Concepts(数据库系统概念)》第六版——第九次作业(第八章)
【答案】《Database System Concepts(数据库系统概念)》第六版——第九次作业(第八章)
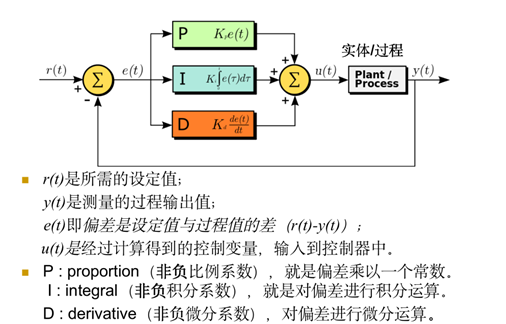
pid实现小车巡线绕桩
【树莓派小车绕桩实验报告】电导 没过树莓 烧过小车 爱过一、实验目的:综合运用本学期学习的内容,实现小车完整地在“8”字形跑道上巡线行驶在保证小车不撞墙、不撞箱、不走错跑道的三大前提下,尽可能地跑出更多的圈数二、实验原理:1. PID自动控制:此部分已在之前的实验报告中详细说明,这里对此做简单描述。PID调节是一种闭环控制的方式,基于反馈调节实现(示意图见下)。在本实验中,使用PID控制的方式,是
6轴机器人运动学(正解)
运动学正解,简而言之,就是给出6个关节变量,求得机械臂末端的位置和姿态即给出j1−j6,求x,y,z,rx,ry,rz。

到底了