- @qq_43441780
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
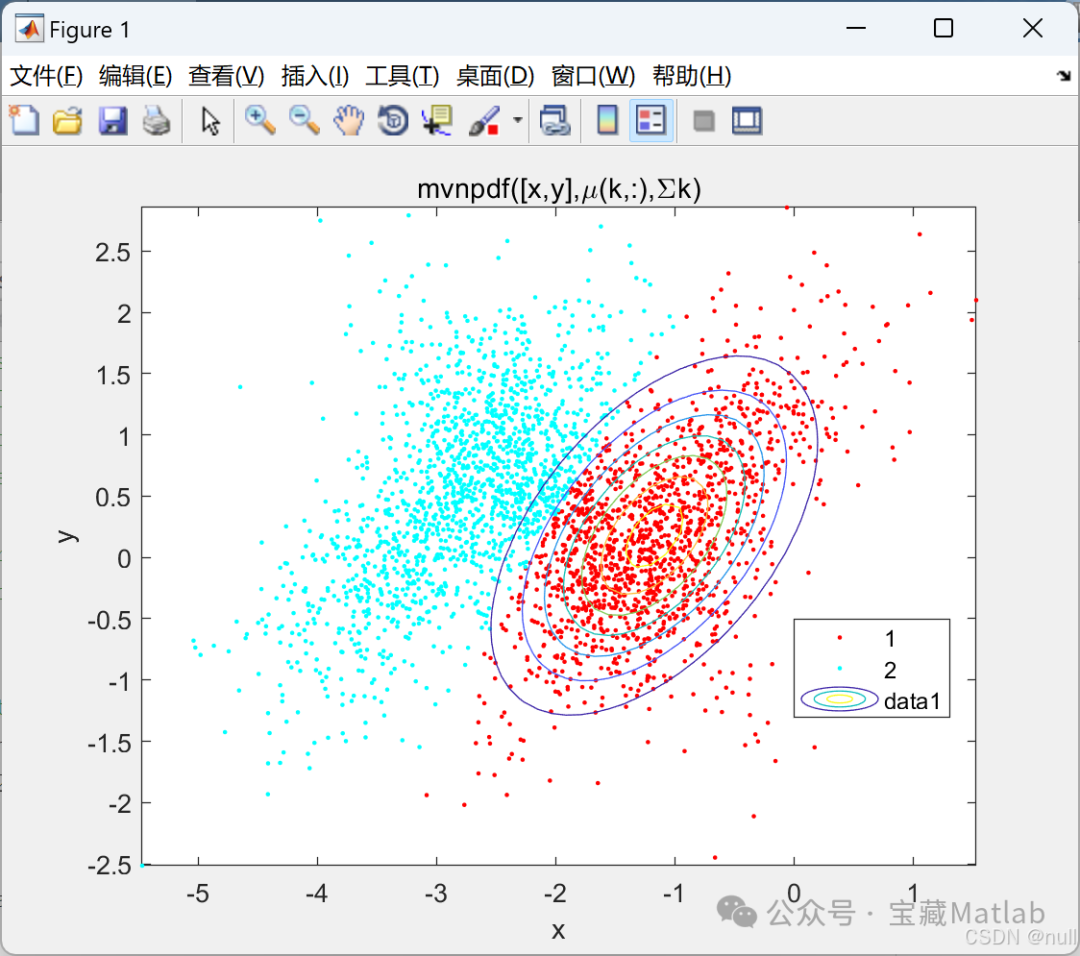
聚类的高斯混合模型是一种强大的聚类算法,它通过多个高斯分布的组合来拟合数据,并允许数据点以不同的概率属于多个聚类。通过优化这些高斯分布的参数(均值、协方差和混合系数),GMM能够捕捉到数据中的复杂结构,并允许数据点以不同的概率属于多个聚类。高斯混合模型(GMM):GMM是一种统计模型,它假设所有数据点都是由多个高斯分布(即正态分布)的加权和生成的。聚类的高斯混合模型(Gaussian Mixtur
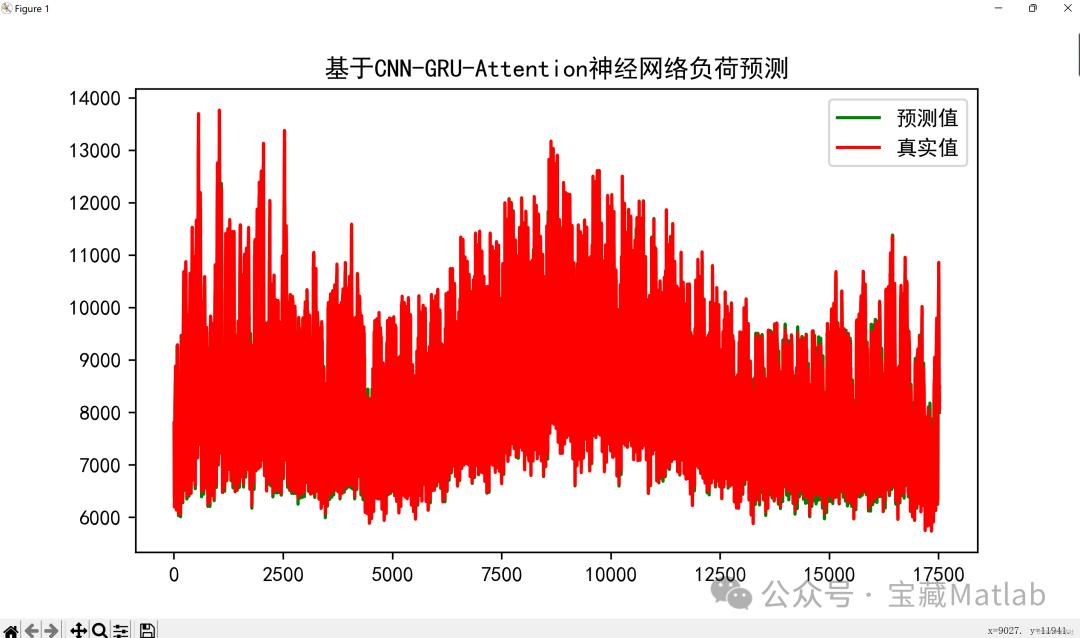
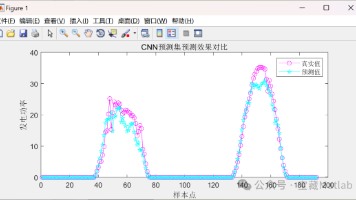
结果表明:与单独的CNN网络或GRU网络相比,CNN-GRU-Attention网络对电力系统短期负荷的预测误差更小,预测精度更高。基于CNN-GRU-Attention混合神经网络的负荷预测方法结合了卷积神经网络(CNN)、门控循环单元(GRU)和注意力机制(Attention)三种网络结构,以提高负荷预测的准确性和效率。这种基于CNN-GRU-Attention混合神经网络的负荷预测方法充分利
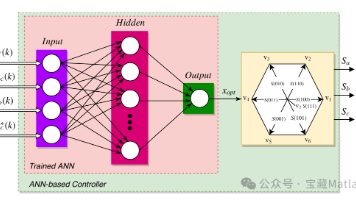
在文献中,为了提高转换器的性能,已经研究和提出了各种类型的经典和现代控制方案,例如非线性方法(例如,迟滞电压控制(HVC))[8],线性方法(例如,具有脉宽调制(PWM)和空间矢量调制(SVM)的比例积分(PI)控制器)[9]–[12],多回路反馈控制[13], [14],无拍控制[15]–[17],基于重复的控制器[18],[19],线性二次控制器(LQR)[20]和滑动模式控制[21],[22
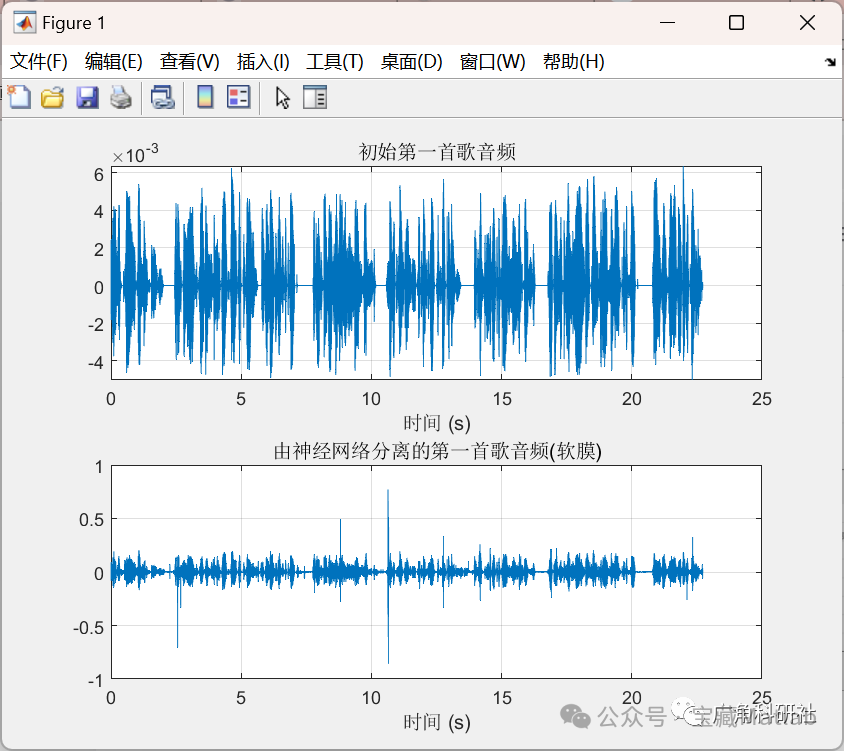
基于神经网络的自监督学习方法在音频分离领域的研究是一个新兴且快速发展的方向,它主要旨在从混合音频信号中分离出单个源音频,如从一首混音音乐中分离出人声和伴奏,或者从环境录音中提取特定的声音源。在音频分离任务中,这意味着模型通过分析输入的混合音频信号本身来学习如何区分和提取不同的音频源,而非依赖于大量预先标记好的“干净”音频数据。总之,基于神经网络的自监督学习方法为音频分离带来了新的可能性,随着技术的
图像处理是计算机视觉和图像分析领域的一个重要组成部分,旨在改善图像质量、提取有用信息或进行特定的变换。您提到的“图像去雾”、“图像增强”以及“灰度直方图均衡化”都是图像处理中常用的技术手段,下面我将分别对这三项技术进行简要介绍:1.1. 图像去雾图像去雾技术主要用于去除由于大气散射(如雾、烟等)导致的图像模糊现象,恢复图像的清晰度。这一过程通常涉及到估计场景的透射率和大气光强度,然后基于这些参数对

基于共识的捆绑算法(CBBA)为多智能体系统中的任务分配提供了一个有效的去中心化方法,特别适用于具有异构代理和复杂任务要求的场景,如远程太空船交会和维修(RPO)任务。基于接收到的信息,每个智能体更新自己的任务捆绑,放弃那些已被其他智能体更高效执行的任务,同时尝试保留或增加对自己有利的任务。综上所述,CBBA提供了一种灵活而有效的框架,适用于解决远程太空船在执行RPO任务时的多任务分配问题,促进了
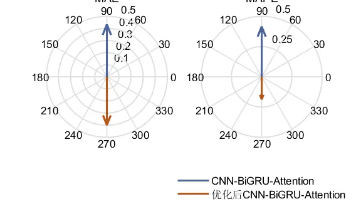
BiGRU(双向门控循环单元):BiGRU是RNN(循环神经网络)的一种变体,它结合了前向和后向两个方向的GRU(门控循环单元),能够更有效地捕捉数据中的时间序列特征。基于北方苍鹰算法优化的CNN-BiGRU-Attention风电功率预测模型,通过结合深度学习的非线性学习能力和优化算法的全局搜索能力,有效提高了风电功率预测的准确性和稳定性。基于北方苍鹰算法优化CNN-BiGRU-Attentio
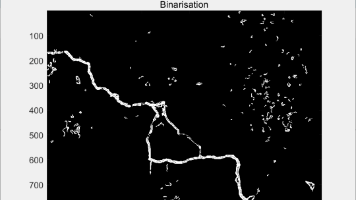
通过检测和标记图片中的裂缝,可以提高裂缝检测的效率和精度,并为后续的维护和修复工作提供有价值的信息。5. **标记和可视化:**一旦裂纹被检测出,可以使用图像处理技术在图像上进行标记,比如在裂缝位置绘制一个矩形或者其他几何形状,并且为裂纹添加标签以便后续分析。3. **边缘检测:**利用边缘检测算法(如Sobel、Canny等)来检测图像中的边缘,裂纹往往会表现为明显的边缘。6. **分析和报告:
通过充分利用CNN在特征提取方面的优势,并结合其他模型或特殊结构来处理时间序列数据中的长期依赖关系,可以实现更准确、更稳定的光伏功率预测。关于【多变量输入超前多步预测】基于CNN的光伏功率预测研究,虽然直接结合CNN与超前多步预测的研究可能较少单独提及GRU或BiGRU等循环神经网络组件,但我们可以基于CNN在特征提取方面的优势,探讨其在多变量输入光伏功率预测中的应用,并结合超前多步预测的需求进行
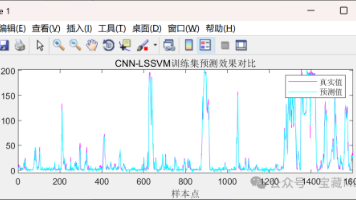
传统的预测方法往往难以捕捉到复杂的非线性关系,而基于CNN和LSSVM的预测模型则能够充分利用数据中的空间和时间信息,提高预测的准确性。基于CNN-LSSVM的风电功率预测模型结合了深度学习和传统机器学习的优点,能够有效地捕捉时间序列数据中的时空特征,提高预测的准确性。然后,将提取到的特征作为LSSVM的输入,进行非线性映射和预测。基于CNN(卷积神经网络)和LSSVM(最小二乘支持向量机)结合的