




- @qq_41945053
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
分布式共识算法
ROS机器人操作系统学习(一)(1)roscoreroscore向一个节点提供连接信息,实现节点之间的通信ROS为点对点传输每个节点在启动时连接到roscore并注册该节点发布和订阅的消息(2)catkincatkin由一系列CMake宏以及定制的Python脚本组成(3)工作区创建catkin工作区并初始化mkdir -p ~/catkin_ws/srccd ~/ctkin_ws/srccatk
ROS常用命令集——Wheeltec小车1.巡线(雷达避障)roslaunch simple_follower line_follower.launch2.雷达跟随。roslaunch simple_follower laser_follower.launch3.视觉跟踪。roslaunch simple_follower visual_follower.launch4.3D建图、3D导航。ros
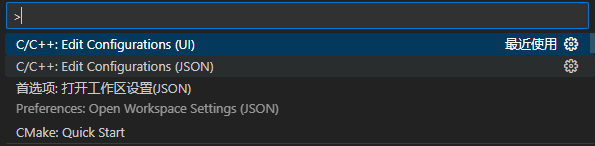
vscode编译环境老是出问题,下面介绍两种解决方法需要提前配置好代码编译需要的库以及编译器位置等等。ctrl+shift+p,输入 >C/C++配置(JSON)打开生成的c_cpp_properties.json。
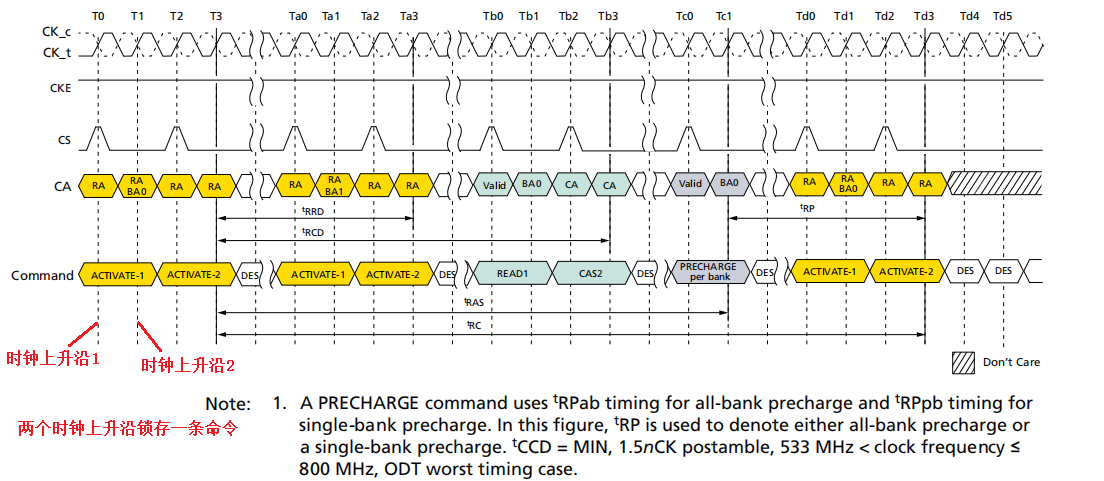
实际上,预充电是一种对工作行中所有存储体进行数据重写,并对行地址进行复位,同时释放S-AMP(重新加入比较电压,一般是电容电压的1/2,以帮助判断读取数据的逻辑电平,因为S-AMP是通过一个参考电压与存储体位线电压的比较来判断逻辑值的),以准备新行的工作。此时,电容的电量(或者说其产生的电压)将是判断逻辑状态的依据(读取时也需要),为此要设定一个临界值,一般为电容电量的1/2,超过它的为逻辑1,进
ROS机器人操作系统学习(二)ROS概念通信机制+开发工具+应用功能+生态系统提高机器人研发中的软件复用率通信机制松耦合分布式通信开发工具应用功能生态系统节点与节点管理器话题与服务参数...
冯·诺依曼架构的特点是将程序指令和数据存储在同一块内存中,通过一个共享的总线进行数据传输。这种结构的优点是简单易懂,容易实现,广泛应用于现代计算机系统中。哈弗架构则是将指令和数据分开存储,通过不同的总线进行数据传输,这种结构可以提高计算机的并行处理能力。

自动驾驶系统综述Autoware系统消息中间件选用ROS系统Apollo系统消息中间件选用CyberRT系统对比Apollo的自动驾驶安全包含安全设计和安全运行两大主要内容,其中细分为操作安全、环境安全、行为安全、功能安全、质量安全、机制安全和安全进化七大内容。综合来看,阿波罗的势力最强,合作伙伴最多,但车规方面和嵌入式系统方面考虑还不够。Autoware考虑嵌入式系统最多,车规方面较少,双方各有