




- @qq_41861406
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
视觉初始化分为单目/单目imu、双目/双目imu/RGBD两种。单目初始化要处理2D-2D匹配问题,比双目初始化要复杂一些。视觉初始化的入口在//track.cc文件中,完成单目初始化功能的代码在TwoViewReconstruction.cc中,ORB-SLAM3还加入了imu,imu相关的初始化在LocalMapping.cc线程主函数中完成。1、Tracking::MonocularInit
vinsf适配kitti 双目惯导+gps :https://blog.csdn.net/hltt3838/article/details/109739046orbslam3适配kitti双目惯导:https://blog.csdn.net/a922922737/article/details/115116952?ops_request_misc=&request_id=&biz_
不知道什么情况,开机鼠标突然不能用了,强制重启也就能打开一个界面就又死了。然后再尝试过无数次以后得到了这个方法。
在安装过程中,会弹出一个窗口提示你选择安装类型。通常建议选择“Customize installation”(自定义安装),以便你可以自定义一些设置。但如果你只是想快速安装,也可以选择“Default installation”(默认安装)。1.版本最新稳定版(鼠标放在Download那里会自动显示)2.双击下载好的exe文件,开始安装Python。
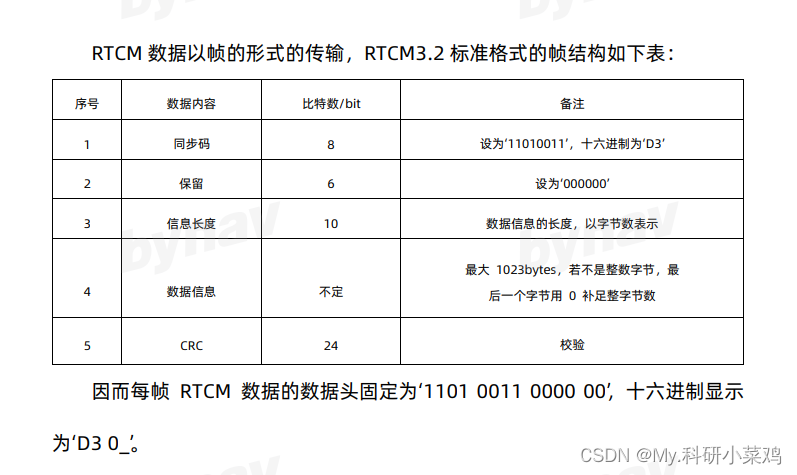
注:[i / 8]:当前位i所在的buff索引,buff[i / 8] :包含当前位信息的字节(Byte),(buff[i / 8] >> (7 - i % 8):截取字节中i位的信息。(bits
1.创建文件并向文件中写数据。2.从yaml文件中读取数据。
1.ifdef用法#ifdef条件编译一般情况下,源程序中所有的代码都会参加编译,但是有时希望对其中一部分内容只在满足一定条件才进行编译,也就是对一部分内容指定编译的条件,这就是“条件编译”,通过#ifdef来实现,具体用法如下:#ifdef 标识符//程序段1#endif当然,有时也希望当满足某条件时对一组语句进行编译,而当条件不满足时则编译另一组语句,此时用 #ifdef 和 #else 来实
想换手机了,但是有些资料需要备份到电脑,结论鸿蒙传更快更方便。前提条件:电脑和手机连接同一个无线网络,windows系统为win10.点击共享,添加Everyone查看电脑IP,win+r ,输入cmd,在终端输入ipconfig,查看ipv4地址在iphone手机打开文件,在浏览页中,右上角三个点,选择连接服务器,输入smb://+你的ip地址,然后输入注册用户名和密码,也就是你电脑的开机账户和
https://blog.csdn.net/weixin_46016576/article/details/116721545?spm=1001.2014.3001.5501安装完vmwaretools仍然不能适应客户,及无法重新安装vmtools无法重新安装vmwaretools尝试了增加软盘,cd/dvd使用物理驱动的方法,结果无效。进入虚拟机设置界面,选择CD/DVD使用ios镜像选择虚拟机
1. 主要内容认识并使用vscode使用g++编译运行一个多文件C++工程使用cmake编译一个多文件C++工程在cscode上面编译运行/调试一个多文件C++工程不用vscode直接使用gdb调试一个多文件C++工程在vscode上直接调试一个C++工程与在vscode上使用gdb调试一个C++工程相结合2.认识并使用vscodevscod下载,安装和基本配置。将vscode远程连接阿里云lin