- @qq_38714958
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文介绍了使用迁移学习技术训练VGG-16模型进行蚂蚁和蜜蜂图像分类的完整流程。主要内容包括:1)迁移学习概念及其在小数据集上的优势;2)VGG-16模型的冻结策略(冻结特征提取层,仅微调最后一层全连接);3)训练过程实现,包括数据预处理、数据集构建、优化器设置(SGD+动量)等;4)实验结果验证,经过2轮训练后验证集准确率达96.08%。该方法显著提升了小样本图像分类任务的性能,验证了迁移学习的
本文介绍了PyTorch框架和VGG-16模型的应用。首先概述了PyTorch的核心特性,包括动态计算图、张量计算和自动微分系统。随后详细解析了VGG-16的网络架构,重点说明其3×3卷积核设计和5次池化的特征提取过程。通过代码示例展示了如何使用torchviz和TensorBoard可视化模型结构,并演示了完整的图片分类流程:从预处理、模型推理到结果解析。最后对比了VGG-16与现代模型的性能差

本文介绍了模型微调技术及其在VGG-16网络上的应用。模型微调是在预训练模型基础上,使用目标领域数据进行再训练,使其适应特定任务的过程。文章详细阐述了微调的核心原理、三种主要策略(特征提取、部分微调和完全微调)以及成功因素分析。通过Python代码实现了一个蚂蚁/蜜蜂分类器,展示了从数据准备、模型修改、分层学习率设置到训练验证的全过程。实验结果表明微调能有效利用预训练模型的特征提取能力,在小数据集
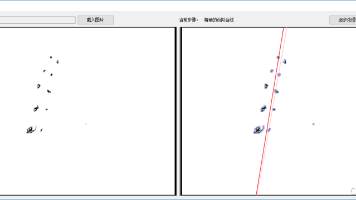
本文提出基于EmguCV的图像点集直线拟合方法,通过C#实现完整处理流程。首先对1280*960ppi图像进行灰度化、自适应二值化和开运算预处理,提取轮廓并计算中心点集。采用Huber距离的M估计鲁棒拟合算法,通过迭代重加权最小二乘法计算直线参数,结合标准差剔除离群点实现精确拟合。详细解析了FitLine算子的数学原理,包括Huber权重函数设计、尺度估计方法和IRLS迭代流程,并与L2/L1/R
本文介绍了使用迁移学习技术训练VGG-16模型进行蚂蚁和蜜蜂图像分类的完整流程。主要内容包括:1)迁移学习概念及其在小数据集上的优势;2)VGG-16模型的冻结策略(冻结特征提取层,仅微调最后一层全连接);3)训练过程实现,包括数据预处理、数据集构建、优化器设置(SGD+动量)等;4)实验结果验证,经过2轮训练后验证集准确率达96.08%。该方法显著提升了小样本图像分类任务的性能,验证了迁移学习的
本文介绍了PyTorch框架和VGG-16模型的应用。首先概述了PyTorch的核心特性,包括动态计算图、张量计算和自动微分系统。随后详细解析了VGG-16的网络架构,重点说明其3×3卷积核设计和5次池化的特征提取过程。通过代码示例展示了如何使用torchviz和TensorBoard可视化模型结构,并演示了完整的图片分类流程:从预处理、模型推理到结果解析。最后对比了VGG-16与现代模型的性能差
基于QT的串口激光雷达上位机开发摘要 本文实现了一个基于QT框架的串口激光雷达上位机软件,主要用于扫地机器人单线激光雷达的数据采集与可视化。系统采用模块化设计,包含串口通信、数据解析和点云显示三大功能模块。通过自定义协议解析激光雷达的极坐标数据,并实时转换为直角坐标系下的二维散点图。点云显示模块采用HSB色彩映射技术,根据反射强度实现从蓝色到高亮色的渐变效果。实测表明,该系统能够稳定接收11520

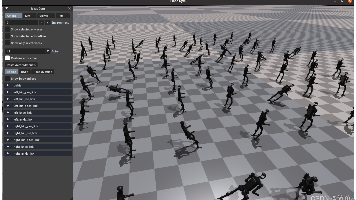
本文介绍了基于Unitree机器人平台和IsaacGym仿真的强化学习框架UnitreeRLGYM。文章以宇树H1人形机器人为例,详细说明了从环境配置到训练部署的全流程,包括Ubuntu系统搭建、CUDA环境配置、IsaacGym仿真平台安装、强化学习训练与推理等关键步骤。作者选择自由度较少的H1机型进行研究,重点分析了其19个关节的自由度配置及限位参数。文章还分享了训练过程中的实际问题,如显卡显