- @qq_36653924
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
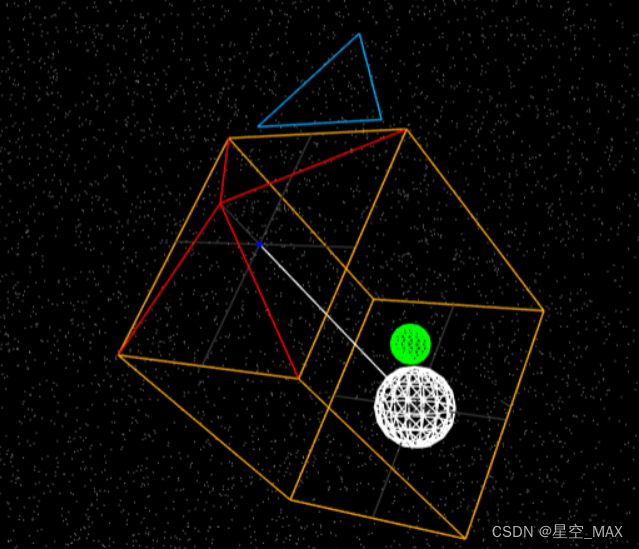
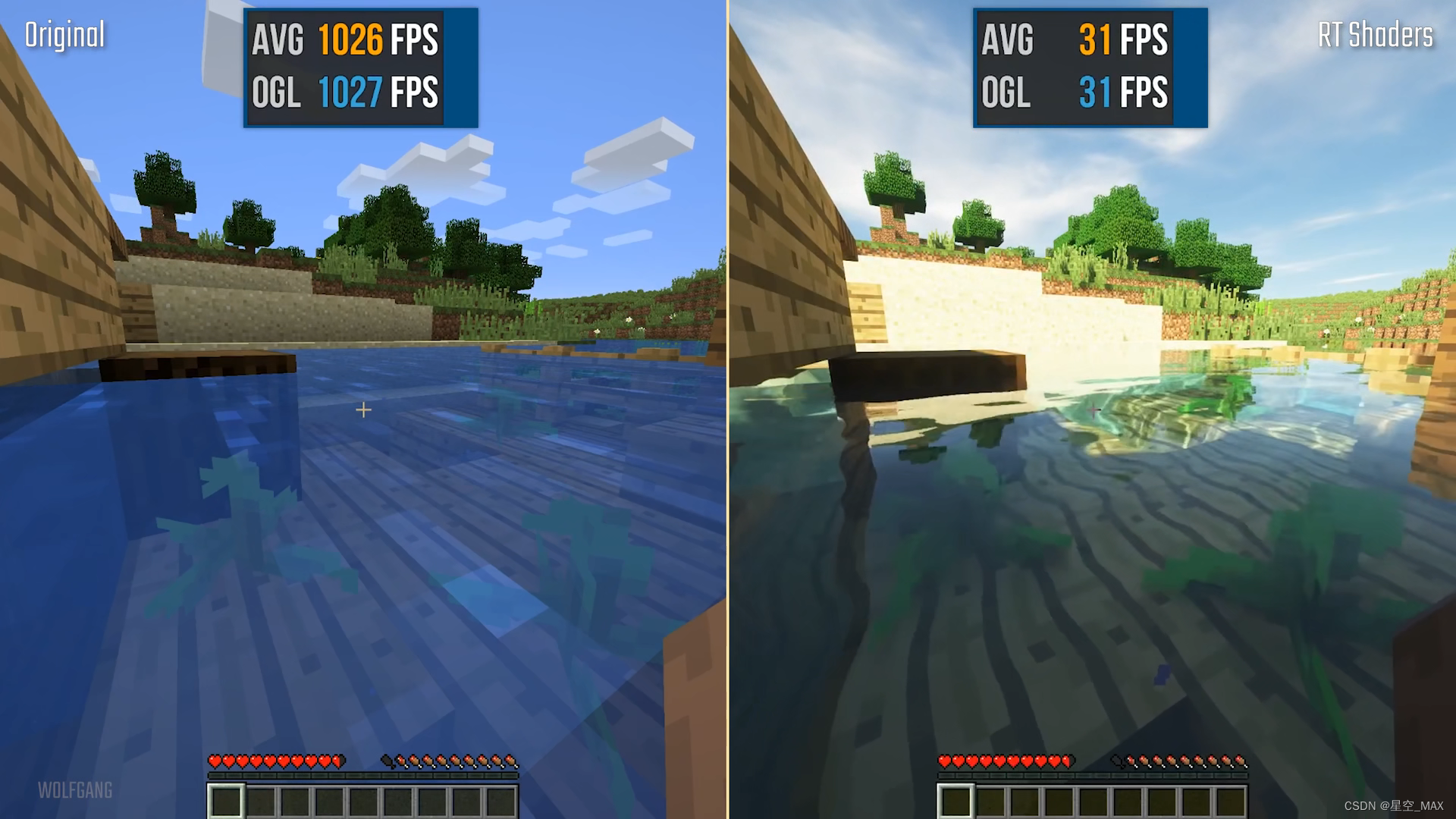
大致介绍光线追踪原理
OpenGL的向量表示法://三维向量glm::vec3 myVector1;glm::vec3 myVector2 = { 1.0f, 1.0f, 1.0f};//四维向量glm::vec4 myVector4;glm::vec4 myVector5 = { 1.0f, 1.0f, 1.0f, 1.0f};// 三维向量数组glm::vec4 Vertor3[] = {-0.1f, 0.0f,
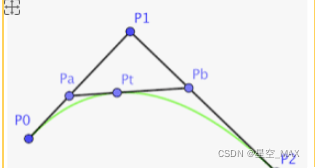
在计算机中,直接拖动去绘制曲线很难获得想要的图形,法国工程师发表了贝塞尔曲线的概念,贝塞尔曲线是计算机图形图像造型的基本工具,是图形造型运用得最多的基本线条之一二次贝塞尔曲线下面的链接可以直观的,拖动第三点即可感受到贝塞尔曲线的“圆滑”贝塞尔曲线绘制:贝塞尔曲线在线绘制🚀...
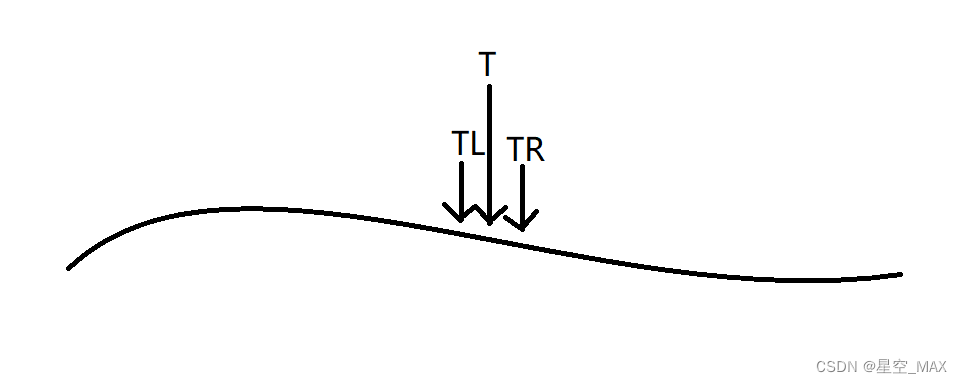
卷积这个概念其实非常简单,先从一维卷积谈起,在信号采集的过程中会有噪音干扰,信号是会随着时间进行波动的比如说一条曲线(拿画图板画的): 要采集T点的数据的时候,要考虑旁边的权重,离中心点T越近,则权重越大,比如上图的三个点,T的权重为2,旁边的点离中心远一点,则权重低一些,那就设为1呗那么最简单的一个一维卷积核就产生了[1,2,1]键入上述图片是一个巨大的集合,那么可以写一个集合:[1,2,3,2
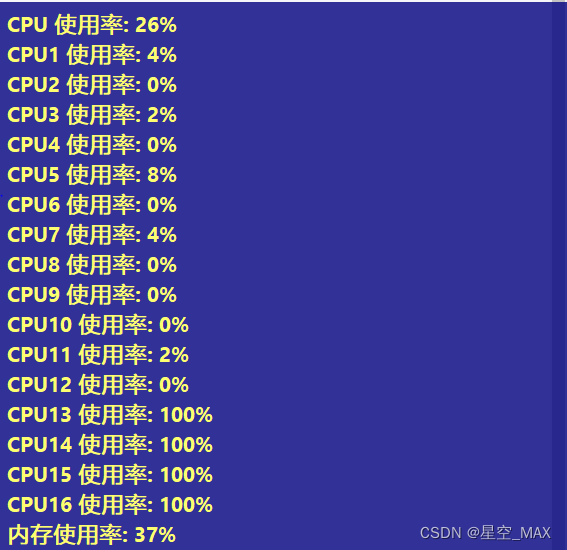
可以发现在编译过程中,将CPU的四个能效核心吃满了,但是性能核心却基本没用着。由于CPU是i5-12600k,这个CPU有6性能核心和4个能效核心。在编译UE5引擎源码的时候发现CPU占用率不高。
最近对CUDA比较感兴趣,于是想从头用CUDA实现一个图像滤波器去处理图像文件,可以自由定制卷积核。

按照方法安装好cuda程序以后,取运行实例程序时候报错no kernel image is available for execution on the device查了查,是关于算力的配置错误解决方法:通过以下网站查找自己的GPU算力CUDA GPU | NVIDIA Developer自己的显卡是960M的,算力只有5.0打开项目配置的CUDA下C/C++的Device后发现配置的算力为5.2
在游戏开发和机器人开发中进场需要用到的一个场景是,给机器人或者游戏角色末位置的位置和姿态,求解可到达给定位置和姿态的各关节的角度值,这里就需要逆向运动学去求解这个问题

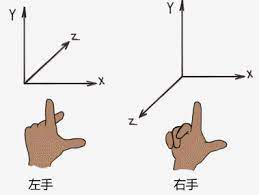
在数学中,坐标系的Z在上面,而在计算机中由于计算机屏幕是一个平面,所以在屏幕上面2D图形向上为y轴,向右为x轴3D图形中,Z轴向屏幕里面的或者向屏幕外面(在图像渲染中,实际上是一种渲染深度)在计算机图形学中,将Z指向屏幕外面,可以理解为,Z越向外,图像越接近人(在UE4中,ZOrder代表渲染层级,层级越高,优先渲染,可以覆盖住后面的物件)在创建场景时候,需要确定确定好是左手坐标系还是右手坐标系,
计算机里面的正交相机和透视相机的区别