




- @pengxiang1998
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
安全帽数据集处理摘要 本文介绍了如何使用HelmentDetection安全帽数据集(5000张VOC格式图像,包含head、helmet、person三类)进行YOLO格式转换。主要步骤包括: 收集VOC标注中的所有类别并创建类别映射 将VOC格式转换为YOLO格式(归一化坐标) 分割数据集为训练集(80%)、验证集(20%)和测试集(10%) 组织文件结构,创建images和labels目录并
RNN存在梯度消失和梯度爆炸的问题,因此提出了LSTM等变体来解决这个问题,针对RNN的问题,是如何解决的呢?
之所以求导,是因为我们的优化模型的求解都是通过求导来进行的,深度学习或者说神经网络当中最重要的一个要素是反向传播算法(Back propagation)。反向传播算法与数学当中求导链式法则有非常密切的关系,当前的流行的网络结构,无不遵循这个法则,比如计算视觉当中的LeNet、AlexNet、GoogLeNet、VGG、ResNet,还有其它的各种网络。反向传播算法与梯度下降算法当然我们在pytor
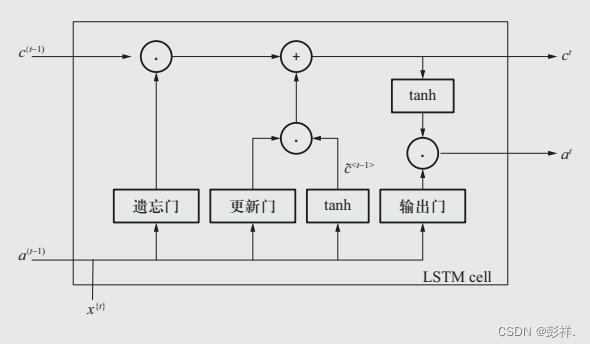
在标准LSTM体系结构中,有1个记忆单元状态和3个门,即更新门Γu、遗忘门Γf和输出门Γo,标准LSTM的体系结构如图2所示。采用x 1, x 2, …, x T表示LSTM网络中的典型输入序列,则其中x {t}表示时间t时的输入特征。为了实现重要信息长时间存储,在LSTM的整个周期内设立并维护一个记忆单元c。根据前一时间的激活单元a 和当前时间的输入x ,通过3个门确定更新、维护或遗忘内部状态向
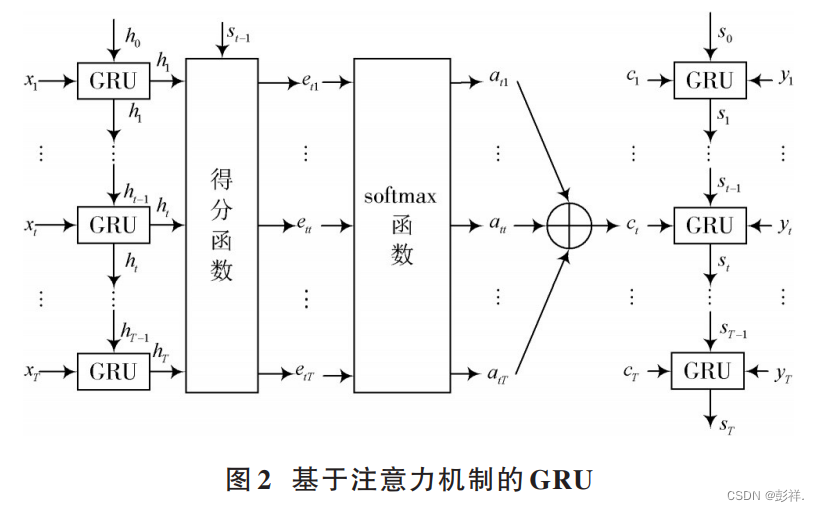
概况论文内容,包含解决的问题,解决的方法,成果金融时间序列由于高噪声性以及序列间的相关性,导致传统模型的预测精度和泛化能力往往较低。为了克服这一问题,提出一种基于注意力机制的循环神经网络预测模型。利用金融时间序列的技术指标作为特征序列,通过GRU 得 到隐藏状态,再利用注意力机制将其重构,并与目标序列一起作为新的 GRU 的输入,提高目标序列的预测效果。利用上证综指数据,分别使用加入注意力机制的门
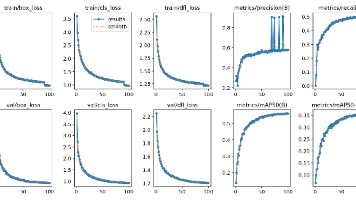
当我们训练一个神经网络模型的时候,我们经常会遇到这样的一个头疼的问题,那就是,神经网络模型的loss值不下降,以致我们无法训练,或者无法得到一个效果较好的模型。导致训练时loss不下降的原因有很多,而且,更普遍的来说,loss不下降一般分为三种,即:训练集上loss不下降,验证集上loss不下降,和测试集上loss不下降。
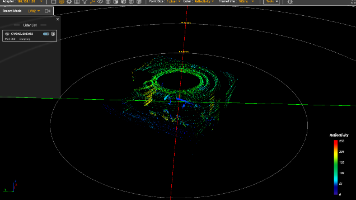
摘要 本文介绍了Mid-360雷达的连接与数据采集方法。首先通过Livox航插线连接雷达与主机,配置IP地址为192.168.1.50,使用Livox Viewer软件查看点云数据。随后通过Python程序接收UDP数据包,解析点云数据。Mid-360支持三种数据类型,默认为32bit直角坐标系格式,每个点包含14字节数据(X/Y/Z坐标、反射率和标签)。程序通过socket接收数据,解析后存储为
之所以求导,是因为我们的优化模型的求解都是通过求导来进行的,深度学习或者说神经网络当中最重要的一个要素是反向传播算法(Back propagation)。反向传播算法与数学当中求导链式法则有非常密切的关系,当前的流行的网络结构,无不遵循这个法则,比如计算视觉当中的LeNet、AlexNet、GoogLeNet、VGG、ResNet,还有其它的各种网络。反向传播算法与梯度下降算法当然我们在pytor
首先博主经常使用Pycharm,这个软件在使用过程中会产生大量缓存文件,高达十几个G。最近博主的电脑C盘使用率与日俱增,看着发红的C盘心中一万只草泥马奔过。常规的清除操作都已经做过了,这里教大家从源头解决问题。如此便一下子清爽了许多。随后便开始了博主的清盘之旅。
摘要 本文介绍了Mid-360雷达的连接与数据采集方法。首先通过Livox航插线连接雷达与主机,配置IP地址为192.168.1.50,使用Livox Viewer软件查看点云数据。随后通过Python程序接收UDP数据包,解析点云数据。Mid-360支持三种数据类型,默认为32bit直角坐标系格式,每个点包含14字节数据(X/Y/Z坐标、反射率和标签)。程序通过socket接收数据,解析后存储为