




- @mojin2005
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
为了进一步提高长线学习的效率,该系列从本章开始将舍弃原始教材的代码部分,专注于理论和思维的提炼,系列名也改为“深度学习”消除误导性。在学习中将理论与实践紧密结合固然有其好处,但在所学知识的广度面前,先铺垫广泛的理论基础,再根据最终实践的目标筛选出需要得到深化的理论知识可能是更有效的策略。概述卷积神经网络可以有效地处理空间信息,而循环神经网络(RNN)则可以很好地处理序列信息。循环神经网络通过引入状

博主因不满CSDN平台内容质量,决定停止更新。后续文章将转移至个人网站www.inkem.space、微信公众号"一杯为品"和知乎账号@一杯为品继续发布。

SAC(Soft Actor-Critic)是一种基于最大熵强化学习的Actor-Critic方法,通过引入策略熵来增强探索能力。相比确定性策略方法,SAC采用随机性策略和重参数化技巧,既降低了方差又提高了采样效率。其核心创新在于:1)在目标函数中引入策略熵项,鼓励多样化的探索;2)使用重参数化技巧将随机性与策略参数解耦,实现更稳定的梯度传播。SAC在连续控制任务中展现出优异的样本效率和鲁棒性,成

本文介绍了确定性策略梯度(DPG)算法及其理论依据。DPG通过输出确定性动作解决了随机策略在连续动作空间中的计算开销、方差问题和训练不稳定等缺点。文章详细推导了确定性策略梯度定理,证明其只需对状态空间积分,比随机策略梯度更简洁。DPG采用Actor-Critic框架,Actor网络输出确定动作,Critic网络评估动作价值,通过离轨策略提升状态探索性。文章还分析了DPG的局限性,如依赖于行为策略的

本文介绍了深度强化学习开山之作DQN算法,重点介绍了其核心思想与关键技术改进。首先阐述了传统Q-learning在连续状态空间下的局限性,提出用神经网络拟合Q函数的价值函数近似方法。完整介绍了DQN算法流程后,针对原始算法存在的两大问题:数据相关性和训练不稳定性,分别引入经验回放和目标网络两项关键技术。经验回放通过缓存和随机采样eph果克服数据相关性问题;目标网络通过解耦评估与目标计算来稳定Q值收

本文介绍了Actor-Critic算法及其变体的基本原理。Actor-Critic结合策略梯度和价值函数近似,Actor负责决策动作,Critic评价动作质量。QAC算法用Q函数替代REINFORCE中的G_t,采用SARSA更新Q网络。AAC算法引入优势函数A=Q-V,通过V函数和TD误差估计优势。为解决数据相关问题,A3C采用多智能体并行异步更新,而A2C改进为同步更新,使训练更稳定。这些方法

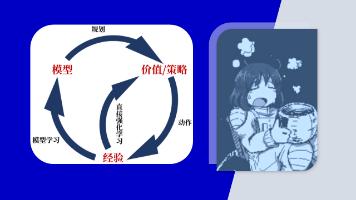
环境的(Model)是一个智能体可以用来预测环境对其动作的反应的任何事物。给定一个状态和一个动作,模型能产生后继状态和下一个收益的预测作为环境的反应结果。根据是否有模型参与,强化学习算法可分为(Model-Based RL,MBRL)和在【深度强化学习】和【分层强化学习】中,我们探讨的都是MFRL,它们将环境视为一个黑箱,智能体直接从与环境交互获得的经验数据中学习价值函数或策略,而不会尝试理解环境
主要参考学习资料:《动手学深度学习》阿斯顿·张 等 著【动手学深度学习 PyTorch版】哔哩哔哩@跟李牧学AI。
主要参考学习资料:《动手学深度学习》阿斯顿·张 等 著【动手学深度学习 PyTorch版】哔哩哔哩@跟李牧学AI由于本系列一开始跳过了第一章引言部分,因此系列编号比书本章节编号提前。现改为和书本统一(因为之前自己的原始笔记也是按照书本章节编的,每次发布都要修改有些麻烦)。
STM32F1系列的FLASH包含程序存储器、系统存储器和选项字节三个部分,通过闪存存储器接口(外设)可以对程序存储器和选项字节进行擦除和编程。读写FLASH的用途利用程序存储器的剩余空间来保存掉电不丢失的用户数据。通过在程序中编程(IAP),实现程序的自我更新。在线编程(In-Circuit Programming,ICP)用于更新程序存储器的全部内容,它通过JTAG、SWD协议或系统加载程序(
