- @m0_74413554
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
当前的E2EAD模型仍然模仿典型驾驶堆栈中的模块化架构,即精心设计了监督感知和预测子任务,为定向规划提供环境信息。场景下规划的鲁棒性。这个策略能够从不同的增强视角来学习预测轨迹的一致性。)来减弱对3D标注数据的需要。该前置模型通过预测角度方向的。引入的角度查询将两个模块链接为一个整体任务来感知驾驶场景。空间中每个扇区区域的物体/客观性/对象性(?最优角度解码器可以看作是一个增强世界模型,能够。角度
commands-conda documentationIf you have used pip and virtualenv in the past, you can use conda to perform all of the same operations. Pip is a package manager and virtualenv is an environment manager.
说No such file or directory: '/data2/guohang/dataset/ARTSR/Set5/LR_bicubic/X2'我一看后面的地是测试数据集的地址,前面的地址不知道啥。我打开了这个配置文件,并把它里面的地址改成了我电脑上数据集相应的地址。模型的当前结构与预训练权重文件中的结构不匹配,导致无法正确加载权重。中,可能指定了一个错误的或不可访问的数据集路径。找到对

针对深度学习优化的加速库,提供高效实现(如卷积、池化、LSTM)每个cuDNN版本需匹配特定的CUDA Toolkit版本。
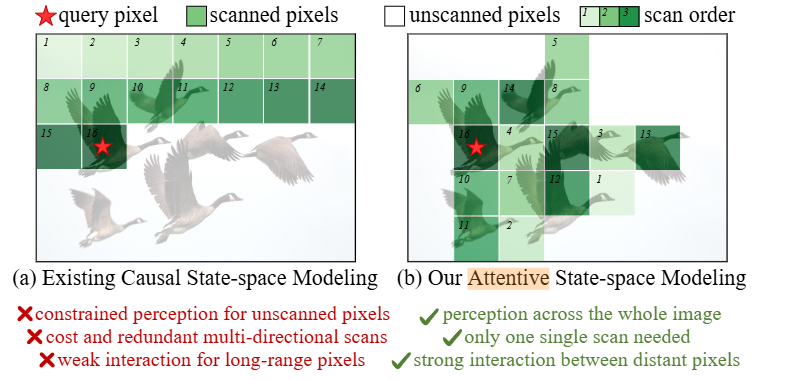
本文提出了一种名为MambaIRv2的图像恢复模型,该模型通过引入类似于视觉变换器(vision transformers (ViTs))的非因果建模能力,即引入注意力机制,允许模型在单次扫描中关注整个图像,解决了Mamba模型在图像恢复任务中因因果建模限制而无法充分利用图像像素的问题。
(应该是随机种子固定了,所以每一GPU每一epoch得到的数据分片都是固定的,从而需要知道当前的epoch,避免看到重复的数据切片)本文主要用于自用,(这篇主要是train部分的),记录了一些我看代码的过程以及理解。,它的作用是创建一个自定义的分布式采样器,确保多GPU训练时数据的高效分配和潜在的数据集增强。实现端到端的训练流程,包括配置解析、环境初始化、数据加载、模型训练、验证和日志记录。从而实
参考: https://blog.51cto.com/u_15962038/12144356。(系统本身就有,然后pip的时候又安装了)卸载掉有cu118的。
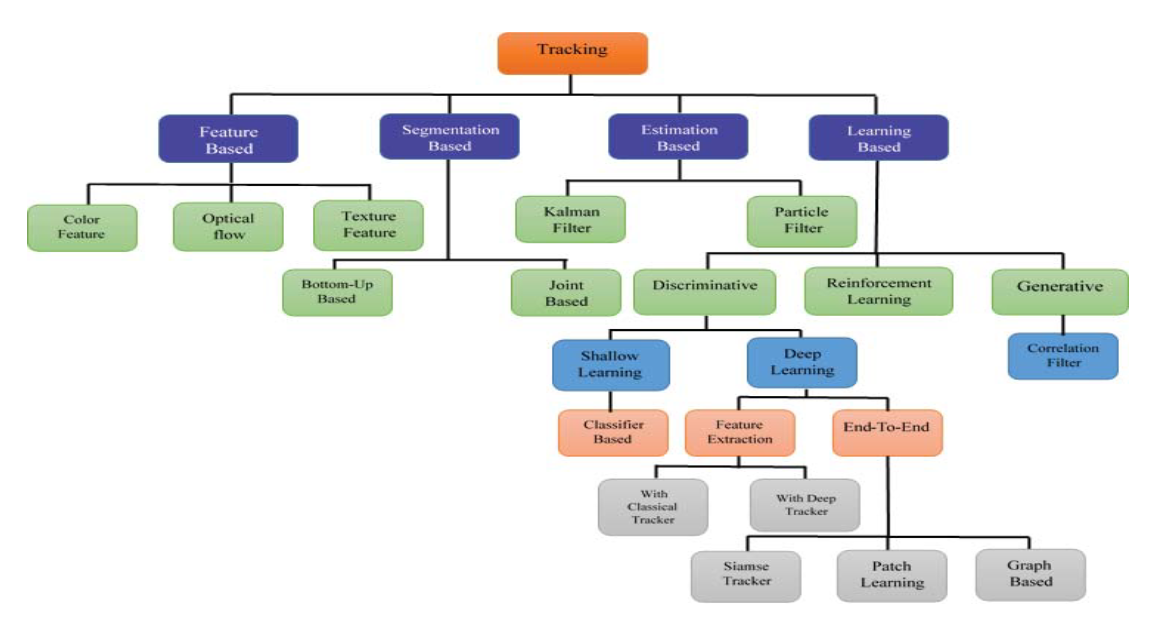
【代码】目标跟踪相关综述文章。