




- @m0_61279136
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
在user_diskio.c中实现底层接口:disk_initialize(初始化)、disk_read(读)、disk_write(写)。分层架构设计:与FAL(Flash抽象层)组件无缝集成,提供统一的Flash访问接口,简化文件系统(如FATFS)或OTA升级功能的实现。调用f_mount()函数挂载存储设备(如f_mount(fs, "0:", 1)),分配逻辑驱动器号(如"0:")

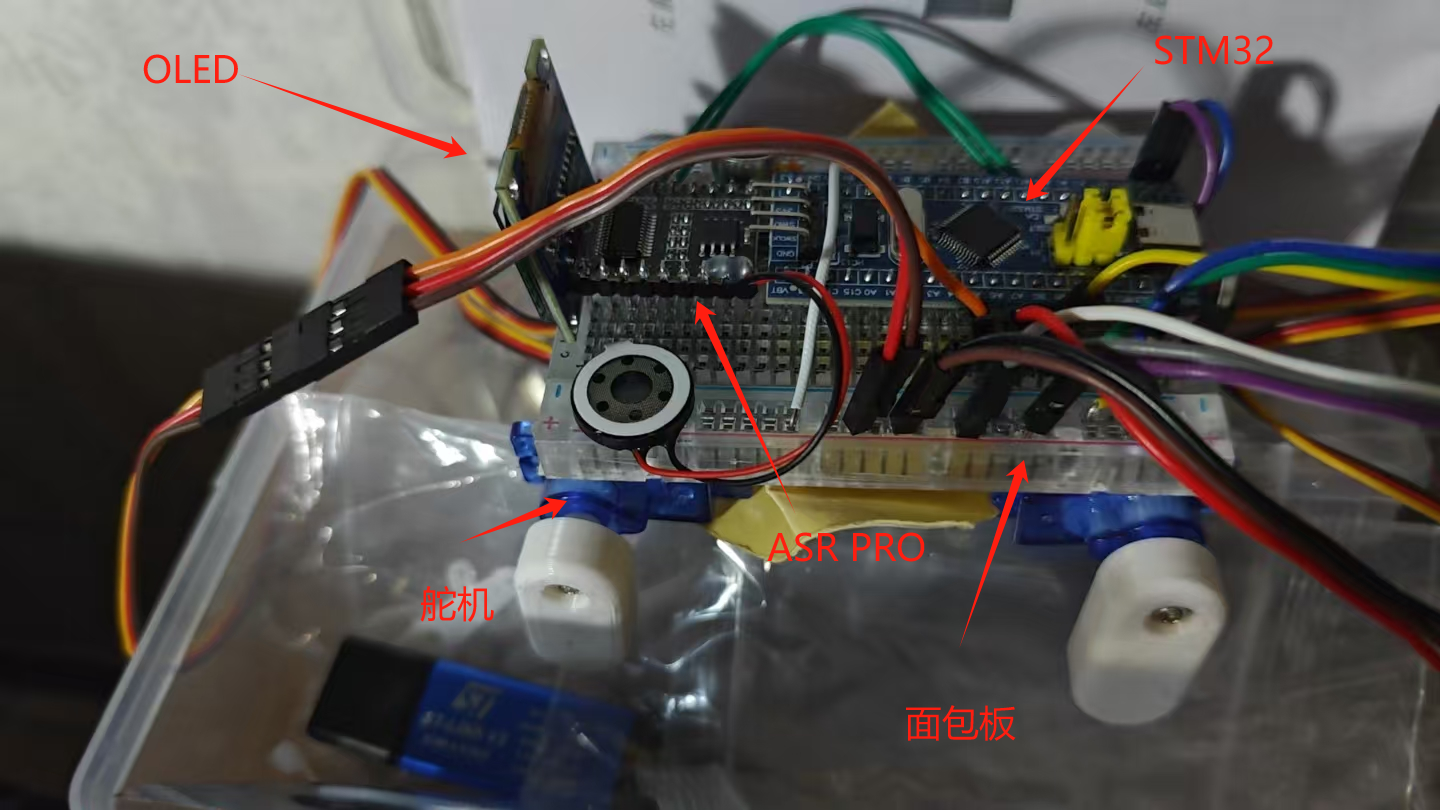
ASR PRO获取到语音后通过串口通信把数据发送到STM32,在单片机内使用中断的方式获取语音数据,,然后根据语音指令判断当前的动作。初始化代码,使用TIM3定时器的四个通道输出PWM驱动舵机,控制腿部的运动。语音模块:ASR PRO,通过天问block软件烧录语音指令。对应动作实现,分别设置对应腿的角度,通过延时达到效果。主控芯片:STM32F103C8T6 使用HAL库。分别展示对应的表情和动
ASR PRO获取到语音后通过串口通信把数据发送到STM32,在单片机内使用中断的方式获取语音数据,,然后根据语音指令判断当前的动作。初始化代码,使用TIM3定时器的四个通道输出PWM驱动舵机,控制腿部的运动。语音模块:ASR PRO,通过天问block软件烧录语音指令。对应动作实现,分别设置对应腿的角度,通过延时达到效果。主控芯片:STM32F103C8T6 使用HAL库。分别展示对应的表情和动
ASR PRO获取到语音后通过串口通信把数据发送到STM32,在单片机内使用中断的方式获取语音数据,,然后根据语音指令判断当前的动作。初始化代码,使用TIM3定时器的四个通道输出PWM驱动舵机,控制腿部的运动。语音模块:ASR PRO,通过天问block软件烧录语音指令。对应动作实现,分别设置对应腿的角度,通过延时达到效果。主控芯片:STM32F103C8T6 使用HAL库。分别展示对应的表情和动
ASR PRO获取到语音后通过串口通信把数据发送到STM32,在单片机内使用中断的方式获取语音数据,,然后根据语音指令判断当前的动作。初始化代码,使用TIM3定时器的四个通道输出PWM驱动舵机,控制腿部的运动。语音模块:ASR PRO,通过天问block软件烧录语音指令。对应动作实现,分别设置对应腿的角度,通过延时达到效果。主控芯片:STM32F103C8T6 使用HAL库。分别展示对应的表情和动
HTML+CSS+Vue3的静态网页,免费开源,可当作作业使用。

HTML+CSS+Vue3的静态网页,免费开源,可当作作业使用。