




- @a_code_rookie
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
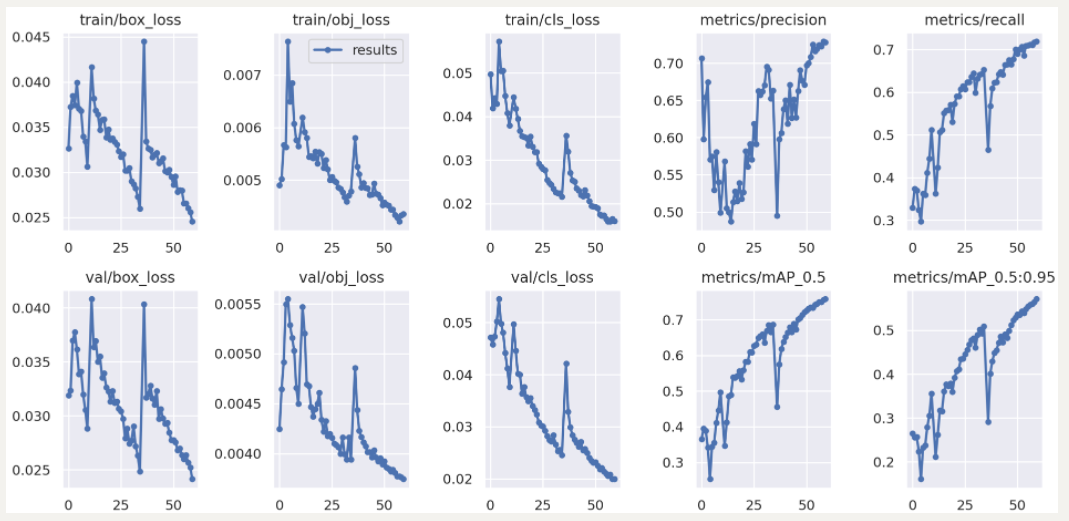
【YOLOv5实战3】基于YOLOv5的交通标志识别系统-模型训练。将介绍如何在yolov5框架中对自定义数据集进行模型训练。

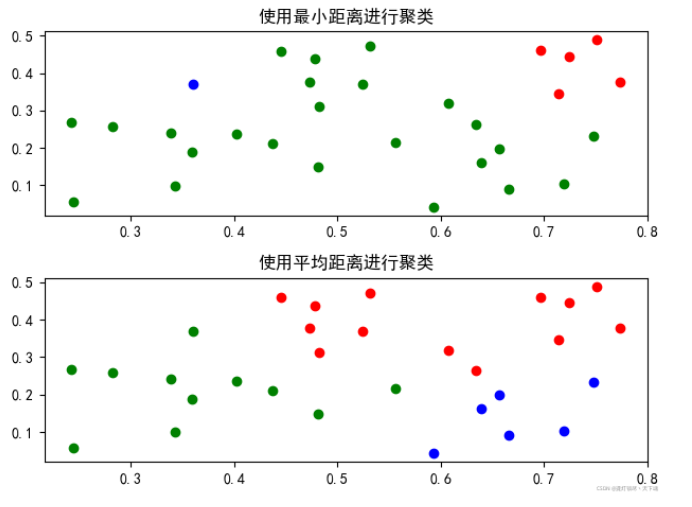
算法思想:初始每个数据都是一个簇;寻找每个簇之间的距离,获取距离列表;合并距离最近的两个簇Ci,Cj,并删除Cj,更新距离列表,使簇个数减1;重复第3步,直到簇个数等于所需个数k。
1.介绍1.1 sigmoid函数逻辑回归中的sigmoid函数:g(θ0+θ1X1+⋯θnXn)=h(θX)=p=eθX1+eθXg(θ_0+θ_1X_1+\cdotsθ_nX_n)=h(θX)=p=\frac{e^{θX}}{1+e^{θX}}g(θ0+θ1X1+⋯θnXn)=h(θX)=p=1+eθXeθX也可写成(分子分母同时除以eθX):g(θ0+θ1X1+⋯θnXn)=h(
基于YOLOv5的交通标志识别系统-TT100K
文章目录1.算法思想2.定义结构体3.函数实现4.测试用例5.完整代码1.算法思想循环创建单链表使用简单选择排序找到当前最小的结点的值交换最小值与当前值重复2,3两步,直到排序完成2.定义结构体只使用到单链表的数据结构:data: 存放数据元素next: 用于指向下一个结点的指针typedef struct LNode {int data;struct LNode *next;} LNode, *
文章目录1.算法思想2.定义结构体3.函数实现4.测试结果5.完整代码1.算法思想广度优先遍历,类似于树的层次遍历,又是熟悉的队列实现。首先将第一个顶点添加到队列中,然后讲该顶点的所有邻接顶点都加入队列中,再将该顶点输出。如此重复直到遍历完整个图。2.定义结构体typedef struct {char vertex[VERTEXNUM];int edge[VERTEXNUM][VERTEXNUM]

1.算法思想使用非递归后序遍历+栈实现。设置当前工作指针p和上一次访问结点visitedNode,使用栈s保存当前正在遍历的结点,栈l保存最长分支。先移动至最左下结点,然后判断是否还有右子树。如果有则继续访问,否则输出当前栈顶元素,如果是叶子结点则判断是否为最长分支,最后修改visitedNode和p,继续对其余元素进行同样的操作。2.定义结构体typedef struct BiNode {int
定义树的结构//定义树的结构typedef struct BiNode {char data;//结点数据struct BiNode *lchild, *rchild; //左右子树指针} BiNode, *BiTree;先序遍历创建二叉树void InCreateTree(BiTree &T) {char ch;cin >> ch;//判断是否为#if (ch !=.
1.算法思想使用层序遍历+队列实现。首先将根结点入队,之后将队头元素出队,然后判断其左右孩子是否存在,如果存在则入队。当访问到最后一个结点时,已经将下一层的结点都入队。判断当前最大宽度与下一层的宽度,取较大值作为新的宽度。循环上述步骤,直到将该二叉树遍历完成。2.定义结构体typedef struct BiNode {int data;struct BiNode* lchild;struct Bi
非递归实现二叉树的先序遍历