




- @Tang_Zhe
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
先快速找到一条可行路径,再利用剩余时间去优化它。该方法适用于当用于规划的时间有限时,可在有限的时间里做出尽可能好的路径规划。图示其他路径规划算法:路径规划算法总览...
ubuntu挂载windows共享文件夹
!!!更新需慎重!!!!一、更新方式系统自带的软件更新器提示可以更新,然后我就更新了- -!二、版本变更从ubuntu18.04更新到了20.04三、出现的问题1. 按照提示重启后长时间无反应等了约2小时,以为是完犊子了,后来发现不用管,它就是很慢 - -(这里建议最保险的方式就是不要动它。。。)2. 输入密码登陆后,只有桌面背景和鼠标,没有桌面图标也无法打开终端CTRL+ALT+F1,进入tty
BundleTrack: 6D Pose Tracking for Novel Objects without Instance or Category-Level 3D Models用于6D姿态跟踪不需要被跟踪物体的3D模型稳定,不受明显遮挡的影响10Hz在NOCS上效果非常好,在YCBInEOAT上效果与se(3)-TrackNet类似(比se差一点)
起因安装了新的anaconda3conda 4.11.0也下载了比较新的tensorflow和pythontensorflow 2.4.1Python 3.9.7但是之前有代码是在tensorflow1.4上跑的,有些模块tensorflow2.x已经删掉了。又不想给tensorflow降版本(目前整个环境的库都是比较新的,tensorflow降了之后可能会引起其他的版本问题),于是新建一个con
起因原本使用的是tensorflow-1.15.0,但是会报错:Executor failed to create kernel. Invalid argument: Default MaxPoolingOp only supports NHWC on device type CPU修改数据格式可以解决,但是要该的地方很多,太麻烦了。intel-tensorflow 对 tensorflow 进行
一、分类可分为两类:1. 基于数据驱动的方法通过海量的历史数据来挖掘移动目标的行为特征,结合目标的当前位置,预判目标的运动趋势。概率统计:卡尔曼滤波、差分自回归移动平均模型、隐马尔可夫模型、高斯混合模型、贝叶斯网络神经网络:BP神经网络深度学习:MLP、RNN、LSTM、ELM、GAN混合模型:LSTM-ARIMA(深度学习+概率统计)2. 基于行为驱动的方法根据目标的当前状态、所处的环境预测轨迹
* 航空器轨迹预测与车辆轨迹预测较为类似,甚至可以共用一套通用的轨迹预测流程:数据准备-预测-更新-输出。* 航空器轨迹预测与航天器轨迹预测不同* 航天与航空的界限:卡门线(距地100km),越过卡门线为航空一、预测内容航空器在空域中遵循的路径。四维航迹预测:纬度、经度、高度、时间维度。二、分类1. 按时间尺度分1)短期预测预测时间<10min不做意图预测,不考虑天气,假设操纵固定(因假设的
单目标跟踪常用的数据集有两个:OTB、VOT两个数据集的评价指标不同。先大概介绍下两个数据集,再介绍评价指标。一、数据集1. OTB数据集Online Object Tracking BenckmarkVisual Tracker BenchmarkOTB分为OTB50和OTB100,表示数据集里的视频数量分别为50个和100个(OTB100包括OTB50)特点:由25%的灰度数据和75%的彩色数
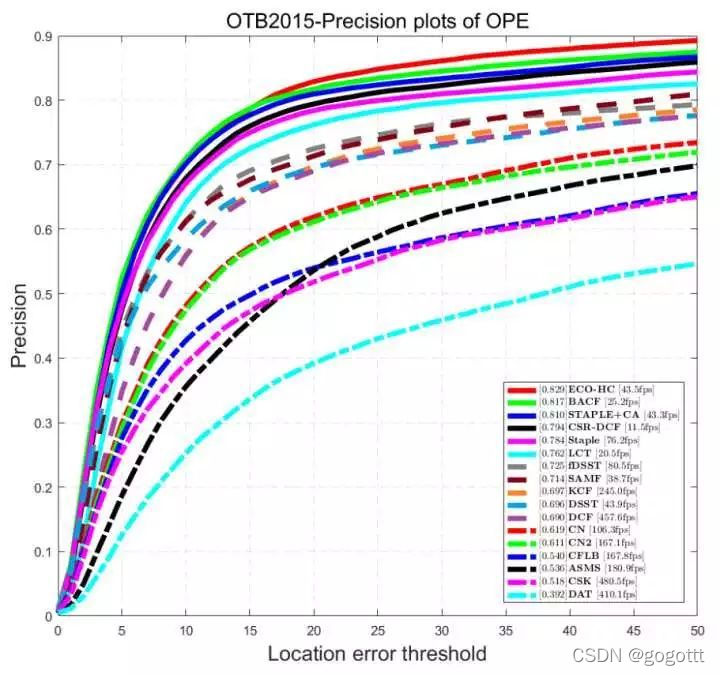
单目标跟踪常用的数据集有两个:OTB、VOT两个数据集的评价指标不同。先大概介绍下两个数据集,再介绍评价指标。一、数据集1. OTB数据集Online Object Tracking BenckmarkVisual Tracker BenchmarkOTB分为OTB50和OTB100,表示数据集里的视频数量分别为50个和100个(OTB100包括OTB50)特点:由25%的灰度数据和75%的彩色数