




- @Mrwei_418
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
假设IP地址为128.11.67.31,子网掩码是255.255.240.0。请算出网络地址、广播地址、地址范围、主机数。方法:将IP地址和子网掩码转化成二进制形式,然后进行后续操作。IP地址和子网掩码对应的二进制形式如下:IP : 1000 0000 0000 1011 0100 0011 0001 1111子网掩码:1111 1111 1111...
假设IP地址为128.11.67.31,子网掩码是255.255.240.0。请算出网络地址、广播地址、地址范围、主机数。方法:将IP地址和子网掩码转化成二进制形式,然后进行后续操作。IP地址和子网掩码对应的二进制形式如下:IP : 1000 0000 0000 1011 0100 0011 0001 1111子网掩码:1111 1111 1111 1111 1111 0000 0000...
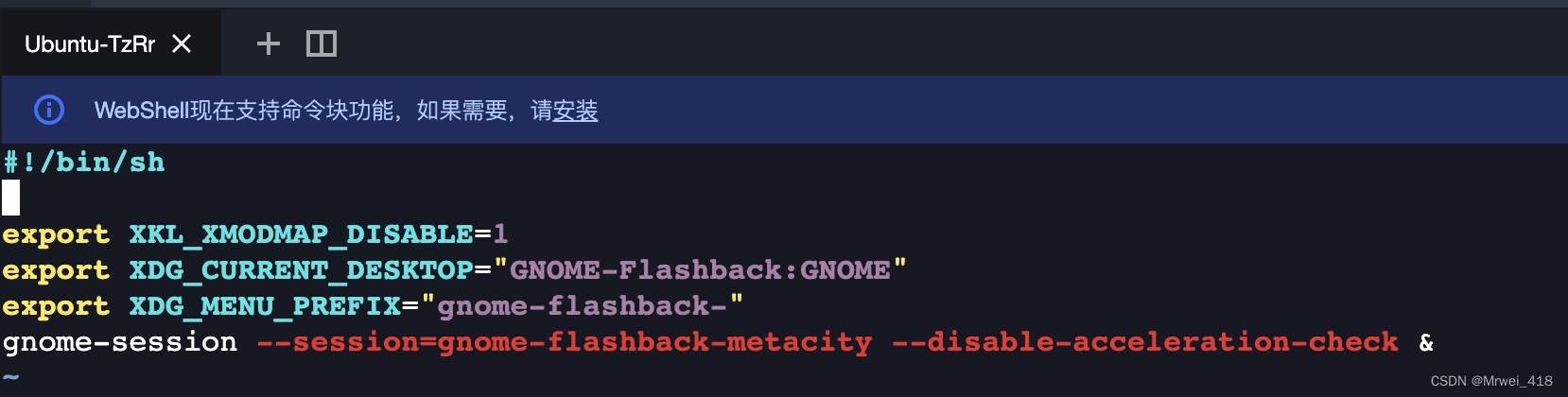
解决vnc黑屏、灰屏问题
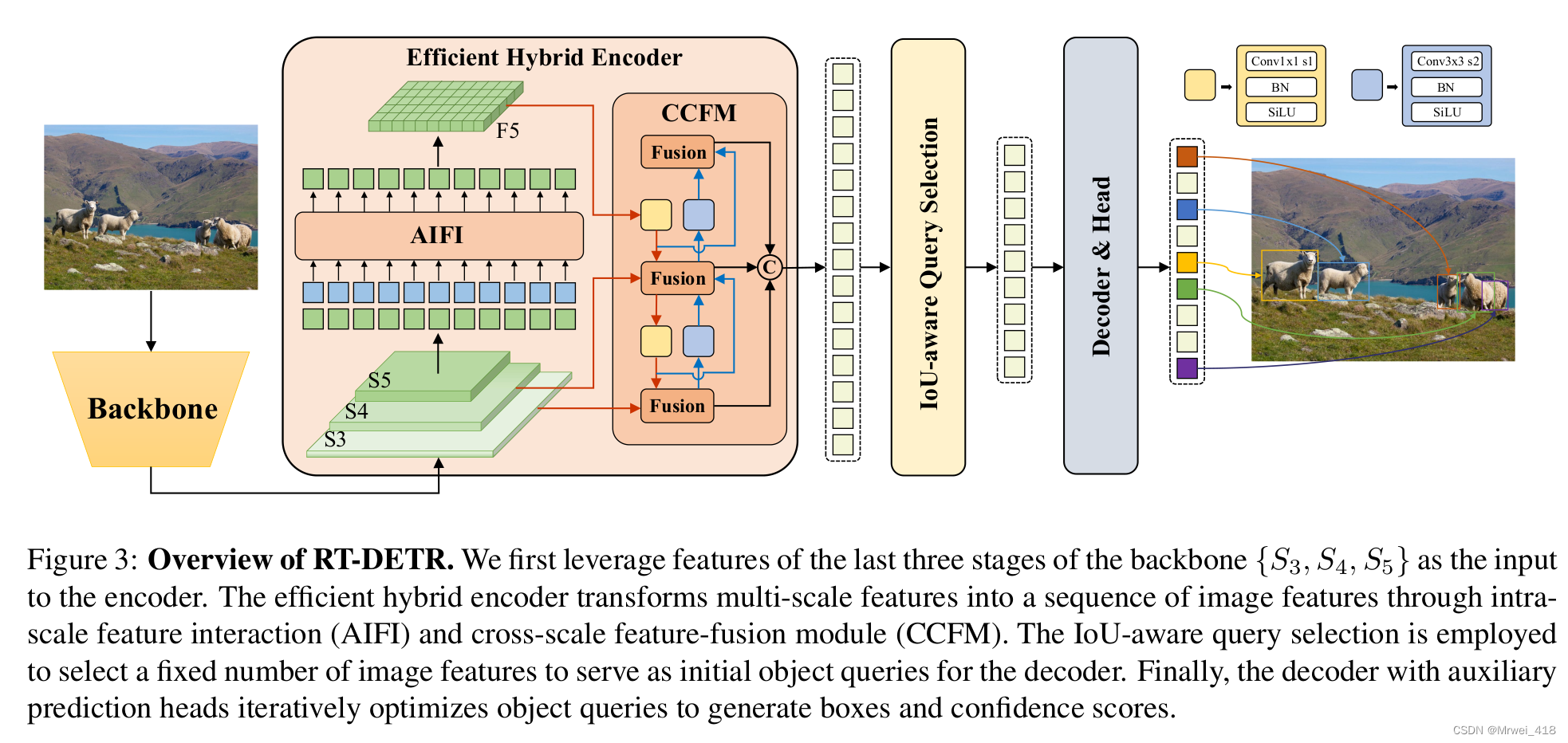
根据结果,我们得出结论,对于需要NMS后处理的实时检测器,无锚点检测器在具有相当精度的情况下比基于锚点的检测器性能更好,因为前者的后处理时间比后者少得多,这在之前的工作中被忽略了。为了分析所提出的IoU感知查询选择的有效性,我们可视化了在val2017数据集上通过查询选择选出的编码器特征的分类分数和IoU分数,如图6所示。(iii)我们的工作为当前端到端检测器的实时实现提供了一种可行的解决方案,所
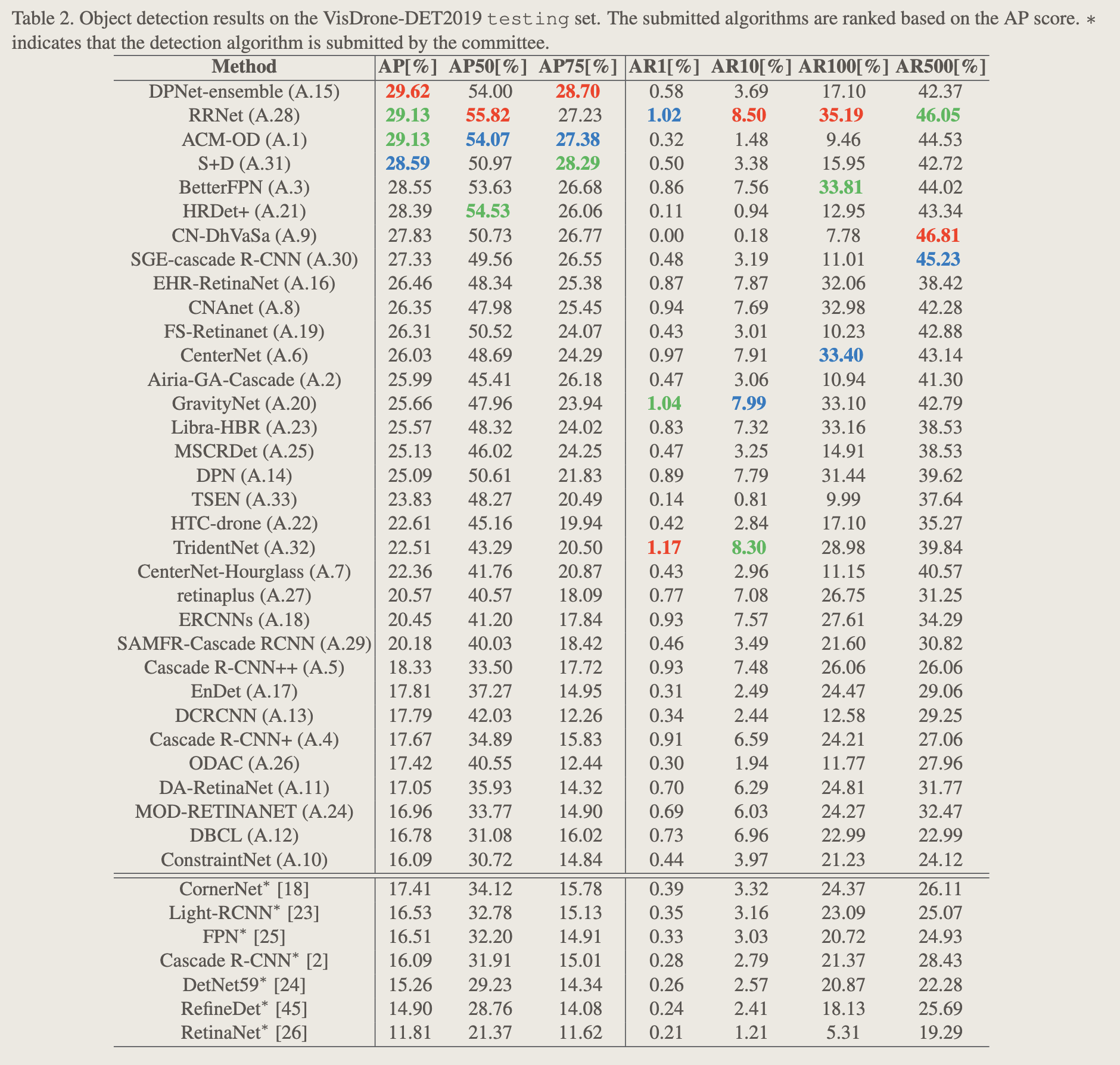
VisDrone-DET2019: The Vision Meets Drone Object Detection in Image Challenge Results论文阅读笔记,33种方法简介
解决yolov7 DDP报错!!!

1000 a+b题解:普通整数加减Code#include<iostream>using namespace std;int main() {int a, b;while (cin >> a >> b) {cout << a+b << endl;}return 0;}1001 又是苹果(状态压缩)题面:传送门:https://acm.