- @LeviLizhi
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
OpenClaw部署其实很简单,一键脚本就能搞定大部分工作。本地部署适合个人使用和测试,云服务器部署适合需要7×24小时在线的场景。如果遇到问题,先查看官方文档或社区讨论,也可以在评论区留言交流。祝你"养虾"成功,让AI助手帮你提升工作效率!
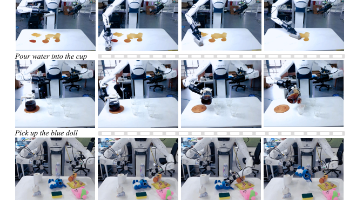
摘要: 北航与AgiBot团队提出的ACoT-VLA框架创新性地将机器人推理过程从语言/视觉空间转移到动作空间,通过**显式动作推理器(EAR)生成粗粒度轨迹与隐式动作推理器(IAR)**提取行为先验,直接以动作序列指导决策,有效解决传统VLA模型的语义-运动学鸿沟问题。该模型在LIBERO等三大基准实现SOTA,真实机器人任务成功率提升显著。代码已开源,支持快速部署与复现。
本文详细介绍了Docker的安装部署以及基于Docker部署Redis和FastGPT的完整流程。首先讲解了Docker的概念、Windows环境下安装前提(需启用Hyper-V)和具体安装步骤,并提供了常用命令和常见问题解决方案。第二部分重点演示了Redis和FastGPT的容器化部署方法,包括镜像拉取、容器运行、环境配置等关键步骤,最后介绍了FastGPT的基本配置和使用方法。通过Docker
阿里云GPU服务器部署指南 本文提供阿里云GPU服务器从购买到深度学习环境配置的完整流程。首先需注册阿里云账号并完成实名认证,创建GPU实例时需注意选择按量付费模式、合适的地域和GPU型号(推荐gn7i/A10入门)。关键步骤包括:1)创建实例时勾选"安装GPU驱动"选项;2)配置存储(建议200GB系统盘);3)设置安全组规则。实例创建后,通过nvidia-smi命令验证驱动

摘要: 北航与AgiBot团队提出的ACoT-VLA框架创新性地将机器人推理过程从语言/视觉空间转移到动作空间,通过**显式动作推理器(EAR)生成粗粒度轨迹与隐式动作推理器(IAR)**提取行为先验,直接以动作序列指导决策,有效解决传统VLA模型的语义-运动学鸿沟问题。该模型在LIBERO等三大基准实现SOTA,真实机器人任务成功率提升显著。代码已开源,支持快速部署与复现。
OpenClaw部署其实很简单,一键脚本就能搞定大部分工作。本地部署适合个人使用和测试,云服务器部署适合需要7×24小时在线的场景。如果遇到问题,先查看官方文档或社区讨论,也可以在评论区留言交流。祝你"养虾"成功,让AI助手帮你提升工作效率!
摘要: 北航与AgiBot团队提出的ACoT-VLA框架创新性地将机器人推理过程从语言/视觉空间转移到动作空间,通过**显式动作推理器(EAR)生成粗粒度轨迹与隐式动作推理器(IAR)**提取行为先验,直接以动作序列指导决策,有效解决传统VLA模型的语义-运动学鸿沟问题。该模型在LIBERO等三大基准实现SOTA,真实机器人任务成功率提升显著。代码已开源,支持快速部署与复现。
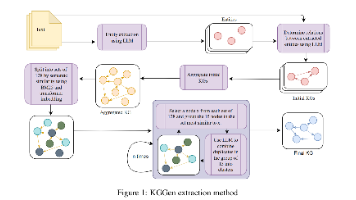
KGGen通过巧妙地将大语言模型的强大理解能力与传统的语义聚类、去重算法相结合,成功实现了从纯文本到。
BM25(Best Matching 25)是一种经典的信息检索算法,是基于Okapi TF-IDF算法的改进版本,旨在解决Okapi TF-IDF算法的一些不足之处。加载DeepSeek蒸馏型 LLM(如DeepSeek-R1-Distill-Qwen-1.5B),通过 “仅从候选列表选择” 的强约束提示(SELECT_PROMPT),让 LLM 在知识库中混合检索的候选中精准筛选出匹配的 IC
为满足不同人脸处理需求,对比 MTCNN、Dlib、MediaPipe、OpenCV 四种方案:MTCNN 高精度检测定位,适用于人脸对齐等;Dlib 可 68 点精细定位,用于人脸分析等,但速度慢且依赖模型;MediaPipe 轻量跨平台,适合实时视频等,不过关键点精度稍低;OpenCV 速度快易用,用于快速原型等简单场景,然精度最低且依赖人工调整 ,各方案优势、劣势与适用场景有别,可按需选用。