- @Hong_J_0826
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
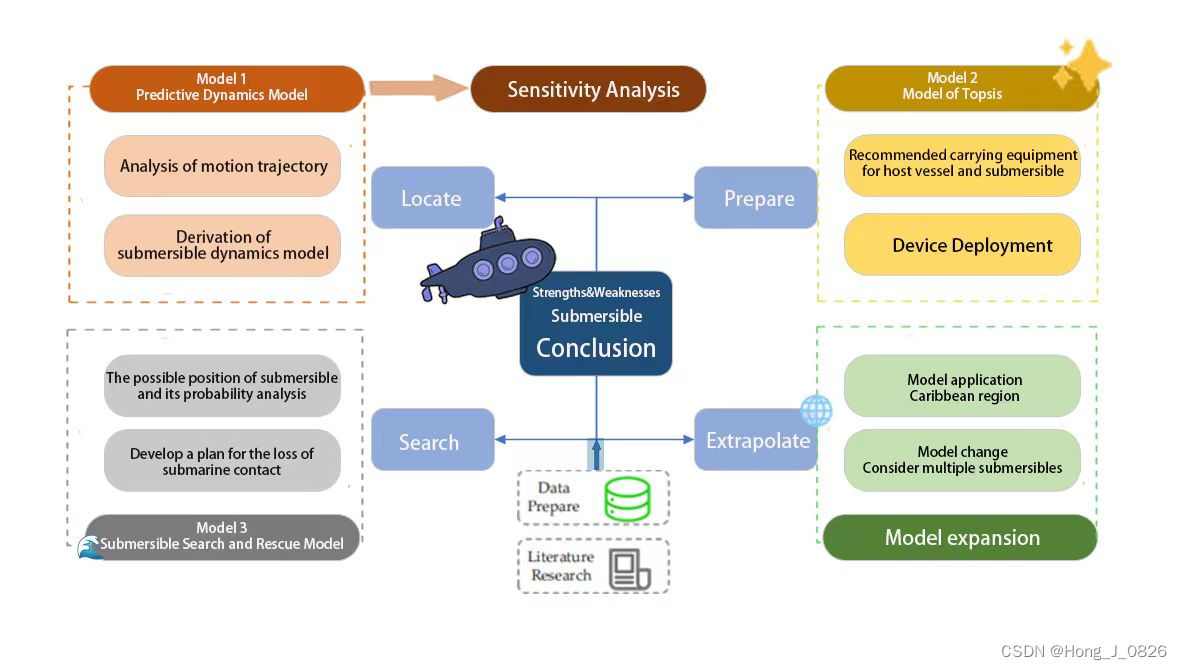
这部分基本是引言introduction下面的一个模块,our work你可以描述一遍你们的工作;或者说直接上流程图一目了然,也可以两者结合但是美赛还是需要好看的图的,如果你是论文手/建模手可以参考以下做法。
首先找到一个github开源的链接,以下以mick-robot举例,这是一个开源的自主导航小车项目,当前地址的代码为麦克纳姆轮和四轮差速ROS底盘的ROS导航节点包。也可以通过github远程托管仓库地址,首先复制这个地址https://github.com/RuPingCen/mick_robot.git。https://github.com/trending/GitHub Trending,筛

首先找到一个github开源的链接,以下以mick-robot举例,这是一个开源的自主导航小车项目,当前地址的代码为麦克纳姆轮和四轮差速ROS底盘的ROS导航节点包。也可以通过github远程托管仓库地址,首先复制这个地址https://github.com/RuPingCen/mick_robot.git。https://github.com/trending/GitHub Trending,筛
首先找到一个github开源的链接,以下以mick-robot举例,这是一个开源的自主导航小车项目,当前地址的代码为麦克纳姆轮和四轮差速ROS底盘的ROS导航节点包。也可以通过github远程托管仓库地址,首先复制这个地址https://github.com/RuPingCen/mick_robot.git。https://github.com/trending/GitHub Trending,筛
数学建模美赛2024B题,杂志、备忘录、海报分享

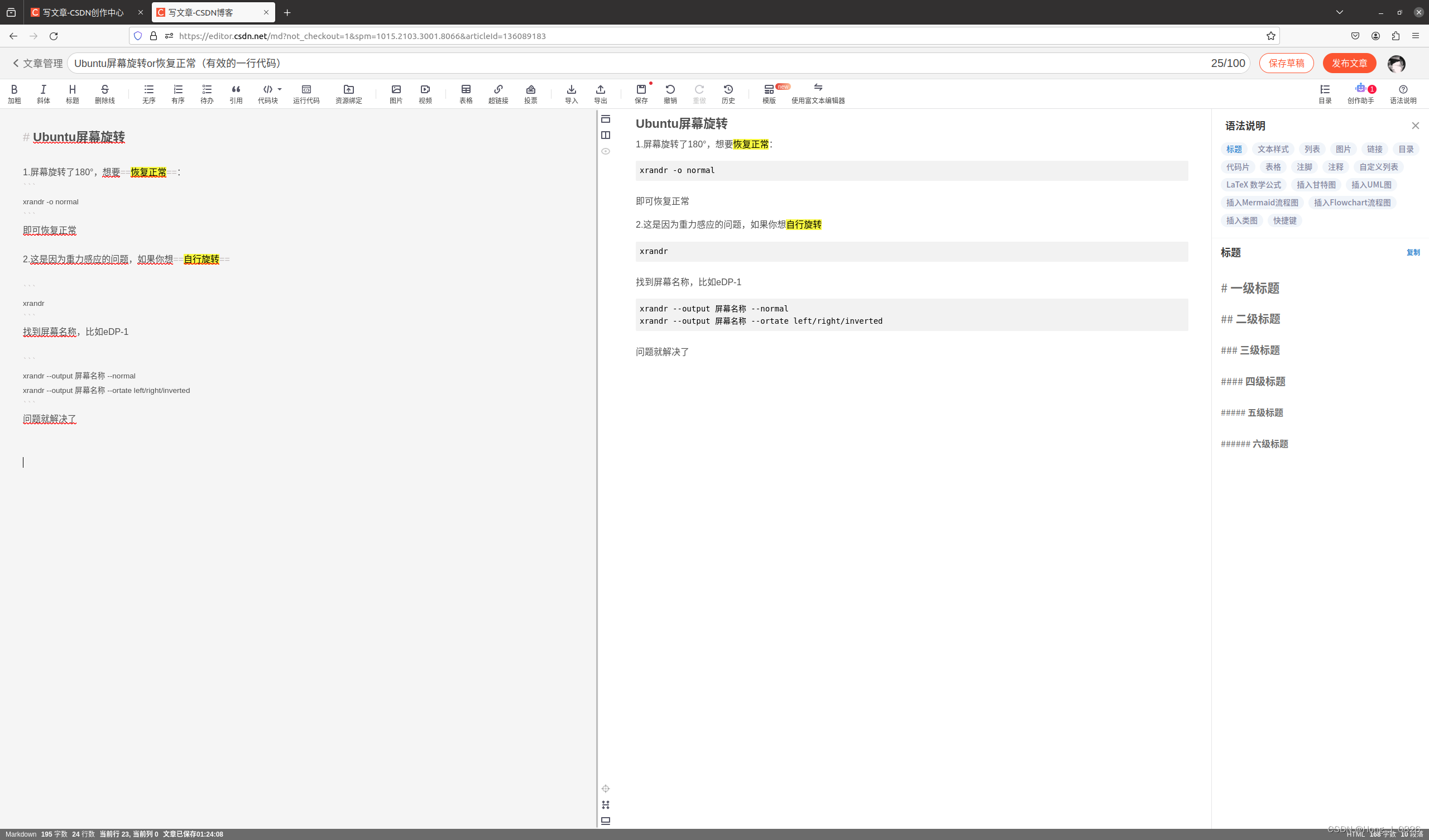
2.这是因为重力感应的问题,如果你想。1.屏幕旋转了180°,想要。找到屏幕名称,比如eDP-1。
ROS下配置opencv的步骤+一些错误解决
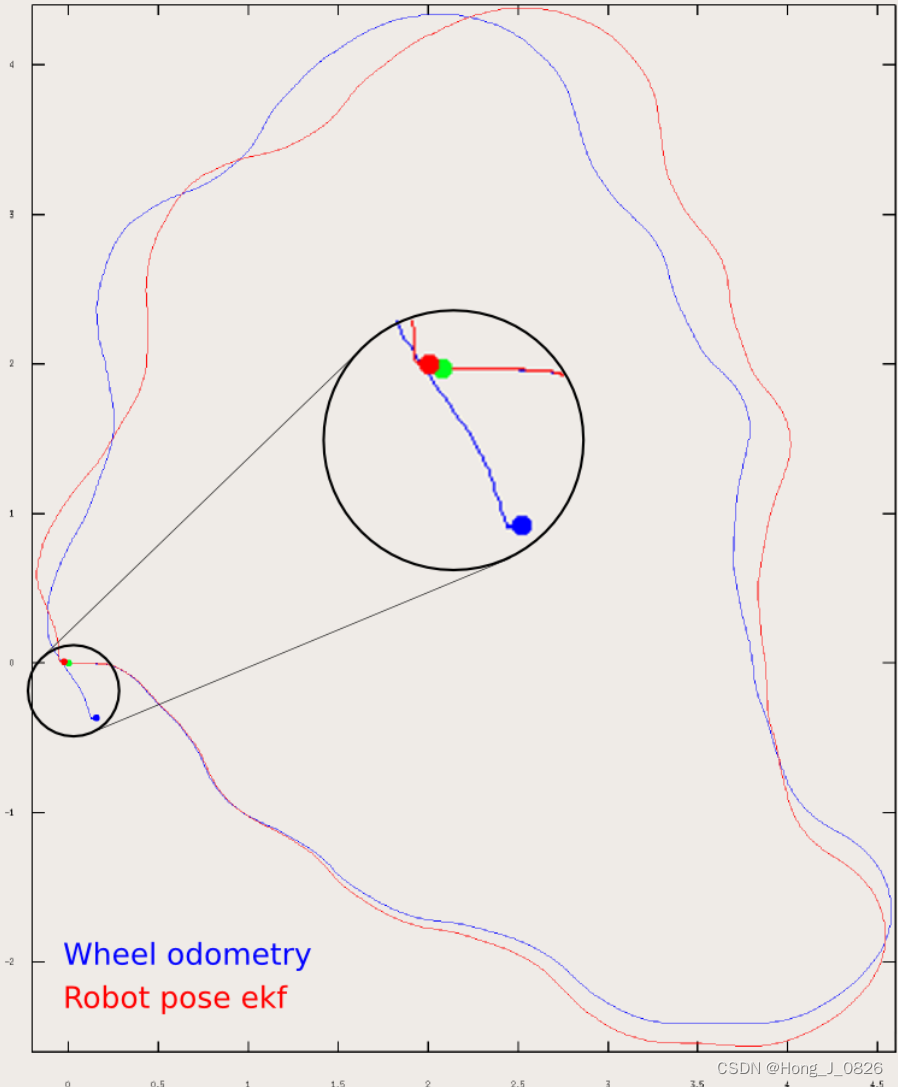
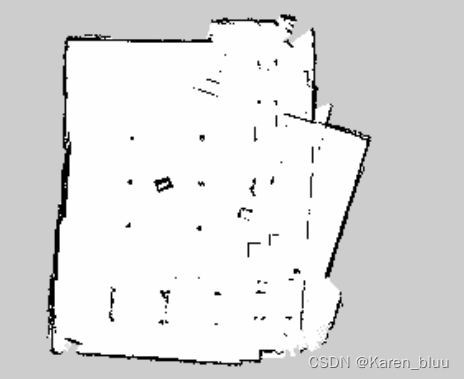
其算法框架是基于RBPF粒子滤波算法,先进行定位再进行建图RBPF:http://t.csdnimg.cn/h4PfS,对于建图而言,简单来说就是通过算法迭代,在粒子群中选出最优粒子,使用激光雷达数据和所关联的历史轨迹来绘制地图。其定位和建图是分离的,每个粒子都携带它们自身的地图(不适合大场地建图,但是我们比赛场地面积用Gmapping建图问题不大)。RBPF问题Gmapping改进粒子多——计算