




- @2303_81537386
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
论文手部分教你如何使用Python实现一个完整的机器学习回归预测项目——共享单车租赁量预测。项目基于UCI真实数据集,涵盖了从数据自动下载、特征工程、探索性数据分析(EDA)到模型构建的全流程。通过对比线性回归、决策树、随机森林及梯度提升树等多种算法,最终利用随机森林实现了R^2 \approx 0.94文中附带完整源码与8类可视化图表生成逻辑,适合机器学习初学者作为实战练习手或课程设置参考。
在高并发系统开发中,本文线程池是驾驶员的核心组件。深入浅出地解析了Linux环境下线程池的设计逻辑,结合生产者消费者模型、**互斥锁(mutex)及条件变量(condition_variable)**等核心技术。文章不仅提供了基于C++11标准的代码实现,还深度复盘了面试中常见的死锁、惊群效应等考点。无论你是在备考408计算机考研,还是准备冲击大厂前期开发,这篇文章能帮助你全面掌握高性能ARM的基
【源码分享】基于 Python 的 PDF 转 Word 批量转换系统,核心基于 pdf2docx 与 pytesseract。本项目采用策略模式、装饰器模式及依赖注入等设计模式开发,遵循 SOLID 原则,具备极高的扩展性。功能涵盖:文件夹自动扫描、批量高保真转换、OCR 识别支持、日志记录与性能监控。适合作为 Python 练手项目、办公自动化工具或 CSDN 资源沉淀。

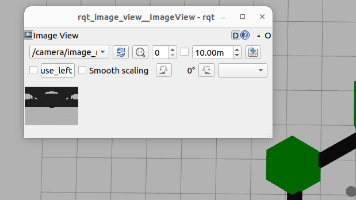
文章重点展示了在视觉视觉渲染(全灰画面)的情况下,如何通过ros2 topic echo验证底层传感器数据的实时性,论证了“数据流渲染渲染流”的调试思路。通过从遥控队列到相机焦点打通的全流程及复盘,为大三学生ROS初学者提供了一个实用的操作性极强的设备导航采集层搭建指南。
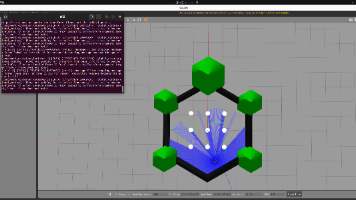
论文详细记录了基于 ROS 2 Humble 与 TurtleBot3 平台的机器人综合实验过程。内容内容从基础的 Turtlesim 控制到复杂的 Cartographer SLAM 建图,并重点分析了 Navigation2 导航框架的部署。博文通过实时修改 DWB 控制器参数(如最大速度、路径贴合权重等),深度对比了导航算法在不同配置下的行为差异,解析了 3D 仿真环境与 2D导航逻辑的
本文分享了利用开源项目g4f搭建本地免登录GPT-4助手的方法。首先强调Python 3.10+环境配置和路径优先级问题,指出常见安装错误解决方案。核心部分提供自动重试+免登录通道的实现方案,包含完整交互式Python代码,支持自动寻找可用通道、过滤广告和掉线重试功能。文章还解答了模块缺失、429限流等常见问题,并指出该方案同时涉及计算机网络、进程I/O等计算机考研知识点。最后说明免费接口可能存在

字节跳动推出的Trae是一款基于VS Code内核深度定制的AI代码编辑器,专为中国开发者打造。其核心亮点包括:1)Builder模式可快速生成完整项目文件;2)全局上下文感知能力;3)原生中文支持。相比Cursor和VS Code+Copilot,Trae在中文环境、响应速度和免费政策上更具优势。实测显示,Trae能高效处理复杂编程任务,如ROS 2项目开发和A*算法实现。目前提供Windows

本文对比了ROS 2中5种主流路径规划算法(A*、Dijkstra、Smac、DWA、TEB),从实现逻辑、适用场景和优缺点进行深入分析。全局规划器A*和Dijkstra适合静态环境,而局部规划器DWA和TEB更擅长动态避障。文章提供了算法选型建议,强调通过路径平滑度、算力消耗和极端场景测试进行综合评估,并推荐了开源资源和参考文献。最终指出应根据具体场景选择最适合的算法配置,建议结合源码和仿真实验

拒绝被AI制造的“屎山”淹没!你是否也在苦恼AI编程时的逻辑幻觉和关联问题?论文从设计模式的启发出发,分享一套“契约驱动型”AI开发范式。通过在Trae中实现“隔离环境”与“分治开发”,我成功将复杂的基金监控逻辑拆解为AI无法拒绝的原子化任务。实测:这种写法虽然增加了5分钟的架构时间,却节省了2分钟小时的调试成本。

拒绝被AI制造的“屎山”淹没!你是否也在苦恼AI编程时的逻辑幻觉和关联问题?论文从设计模式的启发出发,分享一套“契约驱动型”AI开发范式。通过在Trae中实现“隔离环境”与“分治开发”,我成功将复杂的基金监控逻辑拆解为AI无法拒绝的原子化任务。实测:这种写法虽然增加了5分钟的架构时间,却节省了2分钟小时的调试成本。