




- @zbzcDZF
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
项目GitHub地址:https://github.com/Snowstorm0/learn-squaretest项目Gitee地址:https://gitee.com/Snowstorm0/learn-squaretestSquaretest是一款自动生成单元测试的插件,可以装在idea中。
1.查看信息:输入以下程序:dmesg | egrep -i -B100 'killed process'可以输出最近killed的信息。2.设定kill优先度:(1)完全关掉oom(不建议):sysctl vm.overcommit_memory=2echo “vm.overcommit_memory=2” >> /etc/sysctl.conf(2...
原文链接1 粒子滤波(particle filtering)粒子滤波是对预测粒子进行评价,添加不同的权重,越接近于真实状态的粒子,其权重越大;否则,就加的权重小一些。步骤:(1)初始状态:开始认为x(0)在全状态空间内平均分布。然后将所有采样输入状态转移方程,得到预测粒子。(2)预测阶段:粒子滤波首先根据x(t-1)的概率分布生成大量的采样,这些采样就称之为粒子。那么这些采样在状态空间中的分布实际
1 原理对于生成对抗网络GAN,一个简单的理解是可以将其看做博弈的过程,我们可以将生成模型和判别模型看作博弈的双方,比如在犯罪分子造假币和警察识别假币的过程中:生成模型G相当于制造假币的一方,其目的是根据看到的钱币情况和警察的识别技术,去尽量生成更加真实的、警察识别不出的假币。判别模型D相当于识别假币的一方,其目的是尽可能的识别出犯罪分子制造的假币。 这样通过造假者和识假者双方的较量和朝目的的改进
原文链接1 粒子滤波(particle filtering)粒子滤波是对预测粒子进行评价,添加不同的权重,越接近于真实状态的粒子,其权重越大;否则,就加的权重小一些。步骤:(1)初始状态:开始认为x(0)在全状态空间内平均分布。然后将所有采样输入状态转移方程,得到预测粒子。(2)预测阶段:粒子滤波首先根据x(t-1)的概率分布生成大量的采样,这些采样就称之为粒子。那么这些采样在状态空间中的分布实际
1.虚拟环境安装:若安装失败,可能权限不够,需要在根用户下安装:进入根用户2.安装torch:pip install torch或者使用:conda install torch3.若出现报错PackageNotFoundError:Fetching package metadata ...........PackageNotFoundError: Package......
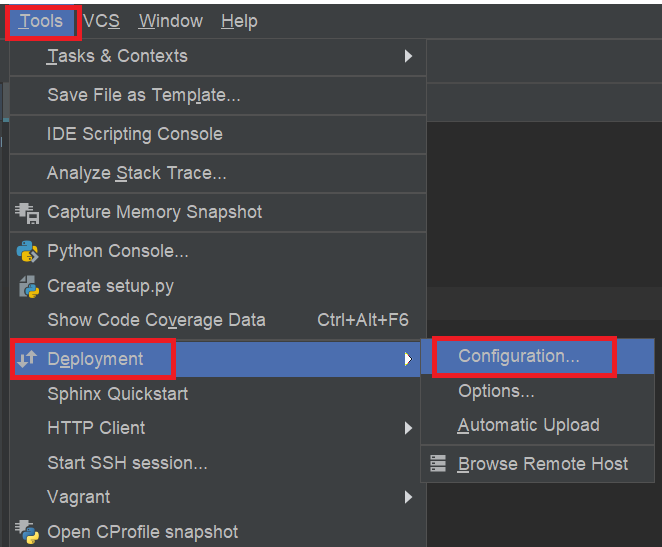
在搞深度学习的时候,我们在本地开发,但是需要在服务器去运行工程,所以需要使用Pycharm进行远程配置,可以实现本地代码自动同步到服务器,并在本地使用服务器的解释器。条件:需要使用专业版Pycharm。
论文地址:https://arxiv.org/pdf/1904.07220v1.pdf代码:pytracking 中有 dimp 的代码摘要与大多数其他视觉问题相比,跟踪需要在推理阶段在线学习鲁棒的特定于目标的外观模型。为了能够进行端到端的培训,目标模型的在线学习因此需要自身嵌入到跟踪体系结构中。由于这些困难,流行的孪生网络仅预测了目标特征模板。但是,这种模型由于无法集成背景信息而具有......
区域建议网络(RPN)首先在faster rcnn中提出。得到用来预测的feature map:图片在输入网络后,依次经过一系列卷积+ReLU得到的51×39×256维feature map,准备后续用来选取proposal。生成Anchors:anchor是固定尺寸的bbox。具体作法是:把feature map每个点映射回原图的感受野的中心点当成一个基准点,然后围绕这个基准点选取k个不...
#include <stdio.h>#include <stdlib.h>//#include <cstdio>//#include <vector>#include<iostream>#include<cstdlib>using namespace std;//定义一个结构体ListNode的结构s...