




- @xiezhipu
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
Ollama 的更新本质是二进制替换+服务重启,重点在于环境适配与配置继承。建议生产环境优先选择脚本自动更新,并关注官方GitHub的版本日志。遇到驱动或网络问题可参考离线方案,模型兼容性问题可通过重拉取解决。附:更新后性能测试工具推荐"prompt": "解释量子纠缠效应"}' # 测响应速度与完整性。
我们之前说过,在dify里配置ollama时,由于dify是在docker里,而ollama是在宿主机上,所以二者的网络需要一些技巧来打通。其中有一个办法,就是把ollama的IP暴露出来。这其实看似不安全,实则还挺危险的。当时,就一直想着,如果能用docker部署ollama就好了。

因为dify被装在了docker中,它的localhost和ollama的是不一样的。我们又说了怎么安装ollama,现在说说怎么把ollama对接到Dify平台上。上回说道,为了简便,我们可以把在线的模型的API,接入到我们的Dify平台上。👆上面这张图,便是一个错误的示范,也是一个最大的坑。还是在模型供应商这里,我们可以看到ollama。

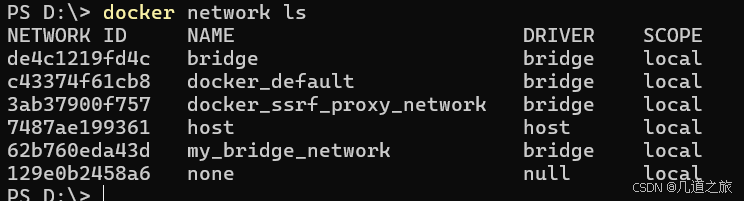
是 Docker 提供的一个命令,用于将现有的容器连接到一个指定的网络中。通过这个命令,用户可以让容器加入到不同的网络环境中,从而实现容器间的通信或者与外部网络的交互。一旦容器被连接到某个网络,它就能够与其他同处该网络中的容器进行直接通信,而无需依赖于主机的 IP 地址或端口映射。
这个错误表明Docker无法识别或加载支持GPU所需的设备驱动程序。以加载内核模块(常见于Ubuntu)。),手动安装后重启服务。
产生的原因是,在docker run时,不小心在命令最后加了个.为什么会错得这么离谱呢?—— 一个字符的偏差可能引发连锁故障。Docker 的命令行参数覆盖机制对新手不友好,多一个字符可能导致完全不同的行为。若开发环境中存在同名文件或目录(如当前目录下恰好有可执行文件。),错误可能被掩盖;命令包含特定字符),避免低级错误进入生产环境。可能被误解析为路径参数,导致脚本逻辑混乱。build的时候有点,
随着图数据库(Graph Database)的流行,越来越多的应用场景开始采用图数据库来处理复杂的关系数据。Neo4j作为领先的图数据库之一,提供了强大的图形查询语言Cypher、高效的存储结构和丰富的生态系统,使得它成为开发人员构建关联性数据分析应用的理想选择。本文将指导您如何使用Docker容器化技术快速部署Neo4j,并通过GraphRAG(Graph Retrieval and Gener

在VS Code中运行Python程序时,正确配置虚拟环境解释器是项目依赖管理的重要环节。以下是如何使用。

我们之前说过,在dify里配置ollama时,由于dify是在docker里,而ollama是在宿主机上,所以二者的网络需要一些技巧来打通。其中有一个办法,就是把ollama的IP暴露出来。这其实看似不安全,实则还挺危险的。当时,就一直想着,如果能用docker部署ollama就好了。
UV集成了虚拟环境管理、Python版本控制、依赖解析等功能,目标是成为类似Rust Cargo的全能工具,简化Python开发流程。UV是由Astral公司(Rust工具Ruff的开发者)推出的高性能Python包管理工具,基于Rust编写,旨在替代传统的。:若通过包管理器(如Chocolatey)安装,可能版本较旧,建议优先使用。:Python 3.3+原生支持,无需安装额外工具。❌ 依赖解析