
写文章




- @wjinjie
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
Claude Code 进行 vibe coding 编程最佳实践!
AI 辅助编程!

【Git 使用笔记】修改github仓库中的文件名
git实用笔记,持续更新
深度学习论文导航 | 01 R-CNN:用于精确目标检测和语义分割的丰富特征层次
深度学习目标检测开山之作
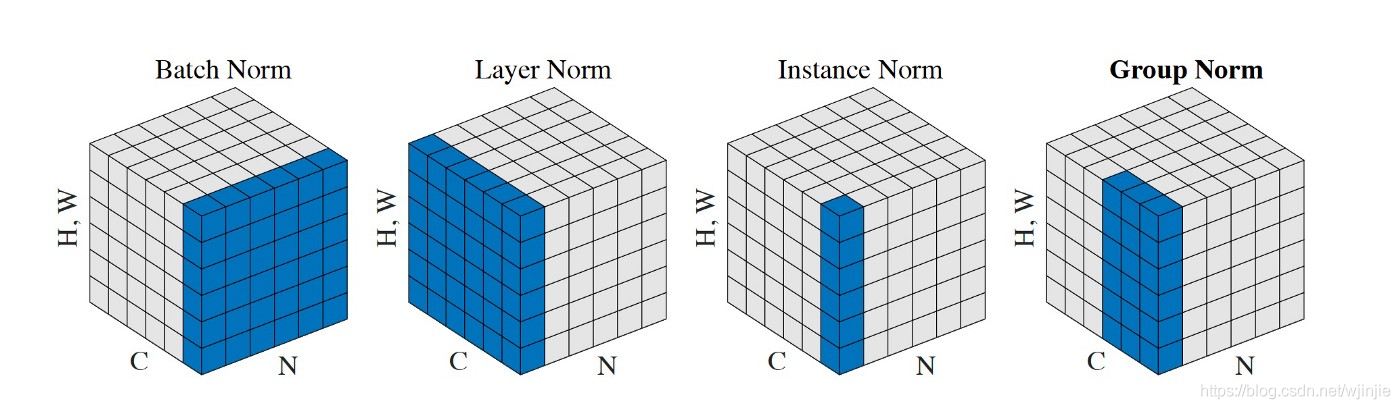
深度学习笔记(八):批量归一化问题总结
BN层的11个重要问题总结!
深度学习论文导航 | 08 ResNet:用于图像识别的深度残差网络
全网最详细的解析——残差网络ResNet
深度学习论文导航 | 11 LaneNet:基于实例分割方法的车道线检测网络
无人驾驶技术环境感知篇——车道线检测网络LaneNet
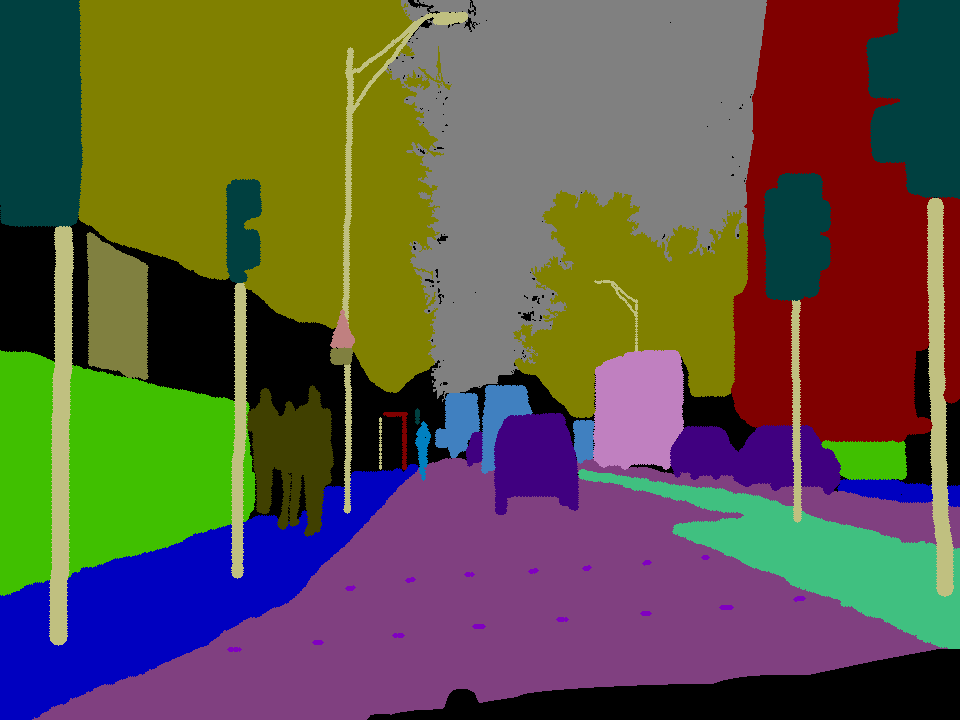
【MATLAB深度学习】采用 Deeplab v3+ 实现全景分割
用MATLAB快速实现你的第一个深度学习项目!
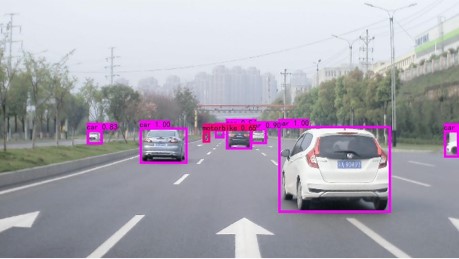
【MATLAB深度学习】采用Faster R-CNN实现车辆目标检测
使用MATLAB训练Faster R-CNN目标检测器,实现对车辆的检测
深度学习笔记(四):梯度下降法与局部最优解
在深度学习过程中,避免不了使用梯度下降算法。但是对于“非凸问题”,训练得到的结果往往可能陷入局部极小值,而非全局最优解。那么这里就以Himmelblau 函数为例位例,探究待优化参数的初始值对梯度下降方向的影响,从而得到不同的局部极小值。首先介绍一下Himmelblau 函数:下图 为 Himmelblau 函数的等高线,大致可以看出,它共有 4 个局部极小值点,并且局部极小值都是 0,所...
【音频分类与检测】PANNs:用于音频模式识别的大规模预训练音频神经网络
音频模式识别是机器学习领域的一个重要研究课题,它包括音频标注、声音场景分类、音乐分类、语音情感分类和声音事件检测等任务。近年来,神经网络已被应用于解决音频模式识别问题。然而,以前的系统是建立在特定数据集上的,数据集时长有限。最近,在计算机视觉和自然语言处理中,在大规模数据集上进行预训练的系统已经很好地推广到一些任务上了。然而,在大规模数据集上进行音频模式识别的预训练系统的研究还很有限。本文提出了在
