- @weixin_54688302
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
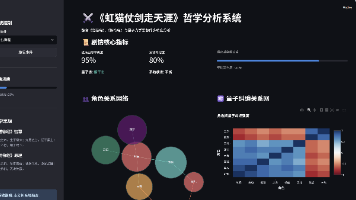
本文介绍了一个基于经典动画《虹猫仗剑走天涯》开发的交互式哲学分析系统。该系统创新性地融合道家哲学与量子力学概念,通过Python技术栈(Streamlit、Plotly等)实现了动态可视化的分析界面。核心功能包括:量化展示"道法自然平衡度"等哲学指标、角色关系网络图、量子纠缠热力图,以及通过事件驱动机制(如陨石降临等剧情节点)实时改变系统状态。项目特色在于将抽象哲学概念(如&q
当彩票遇上人工智能,会碰撞出怎样的火花?我花了一周时间,用Python和PyTorch打造了一个AI彩票仿真系统,期间踩了无数坑,也收获了大量经验。本文将完整记录开发思路、核心代码、调试过程,以及最终运行效果,希望能给你带来启发。
本文面向进阶视觉开发者,全面对比分析Intel RealSense D455和D435i的技术特性,并结合奥比中光Gemini系列相机,针对机器人开发和无人机应用场景,提供完整的技术选型方案。文章涵盖核心参数对比、技术原理分析、场景适配策略、实测数据引用以及完整的开发建议,帮助开发者构建技术互补的视觉感知系统。
本文面向进阶视觉开发者,全面对比分析Intel RealSense D455和D435i的技术特性,并结合奥比中光Gemini系列相机,针对机器人开发和无人机应用场景,提供完整的技术选型方案。文章涵盖核心参数对比、技术原理分析、场景适配策略、实测数据引用以及完整的开发建议,帮助开发者构建技术互补的视觉感知系统。
本文介绍了一个基于经典动画《虹猫仗剑走天涯》开发的交互式哲学分析系统。该系统创新性地融合道家哲学与量子力学概念,通过Python技术栈(Streamlit、Plotly等)实现了动态可视化的分析界面。核心功能包括:量化展示"道法自然平衡度"等哲学指标、角色关系网络图、量子纠缠热力图,以及通过事件驱动机制(如陨石降临等剧情节点)实时改变系统状态。项目特色在于将抽象哲学概念(如&q
在这个科技与意识交织的时代,我们探索的不仅是外部的物理世界,更是内在的意识宇宙。本文将详细介绍一个融合量子物理、神经网络、跨物种连接和AI分析的创新系统——量子意识连接系统,它利用PyQt6构建了一个沉浸式的意识探索平台。
本文介绍了一套基于RT-Thread操作系统的无人机结构检测嵌入式仿真系统。系统模拟无人机下视摄像头采集32×32灰度图像,通过图像处理算法(高斯滤波、Sobel边缘检测、阈值分割、形态学运算、连通域分析)提取裂缝缺陷指标,包括裂缝数量、总面积、总长度、最大长度和平均宽度,并通过UART以自定义二进制协议上报至上位机。整个系统在STM32平台上实现,仅占用约63KB Flash和6KB RAM,验
用图神经网络模拟国家决策,用多智能体强化学习驱动历史进程——这是我用Python构建的“世界模拟器”,它正在虚拟时空中演绎大国兴衰、联盟重组与文明危机。
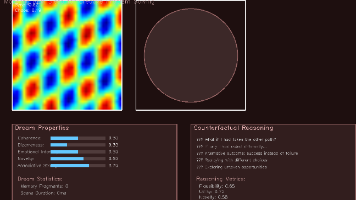
摘要:本文提出一种受人类梦境启发的创造性探索算法,通过模拟快速眼动睡眠中的记忆重组机制,设计了一套包含记忆碎片化、反事实推理和模式抽象的计算机算法。该算法采用C++实现,核心模块包括梦境生成引擎、基于梦的探索器和可视化系统,通过交替进行清醒探索和梦境认知来突破局部最优。实验表明,该方法比随机探索能提高30%的平均奖励。文章详细介绍了算法原理、代码实现、编译指南及常见错误解决方案,为类脑计算和创造性
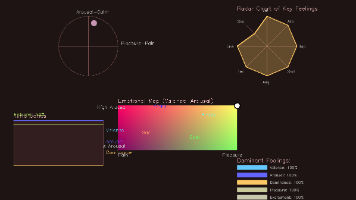
用代码模拟人类复杂的情感世界,从愉悦到痛苦,从社会连接到身体感知,打造一个可交互的情感数字孪生