写文章




- @weixin_51612528
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
Ubuntu修改docker镜像及容器默认存储位置
ubuntu修改docker默认存储位置

虚拟环境中 OpenVINO 识别英特尔的 iGPU 和 NPU 设备(ubuntu系统)
在虚拟环境中 OpenVINO 识别英特尔的 iGPU 和 NPU 设备(ubuntu系统)的方法
通过 SSH 远程连接 docker 容器
通过 SSH 远程连接 docker 容器

使用自制数据集训练YOLOX算法
使用LabelImg工具自制数据集训练YOLOX算法

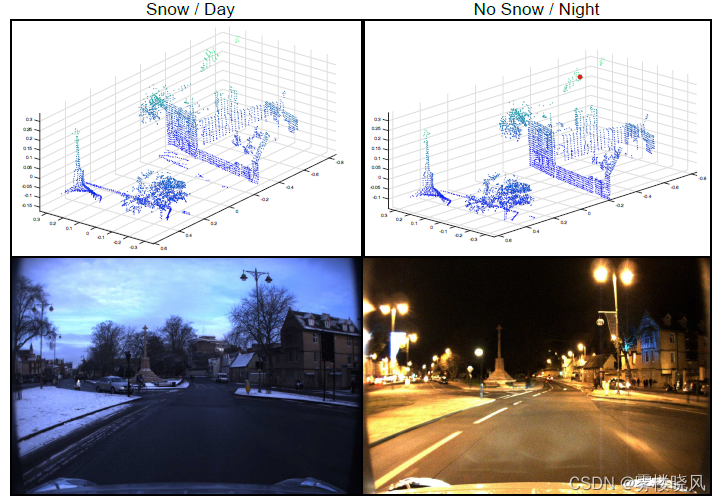
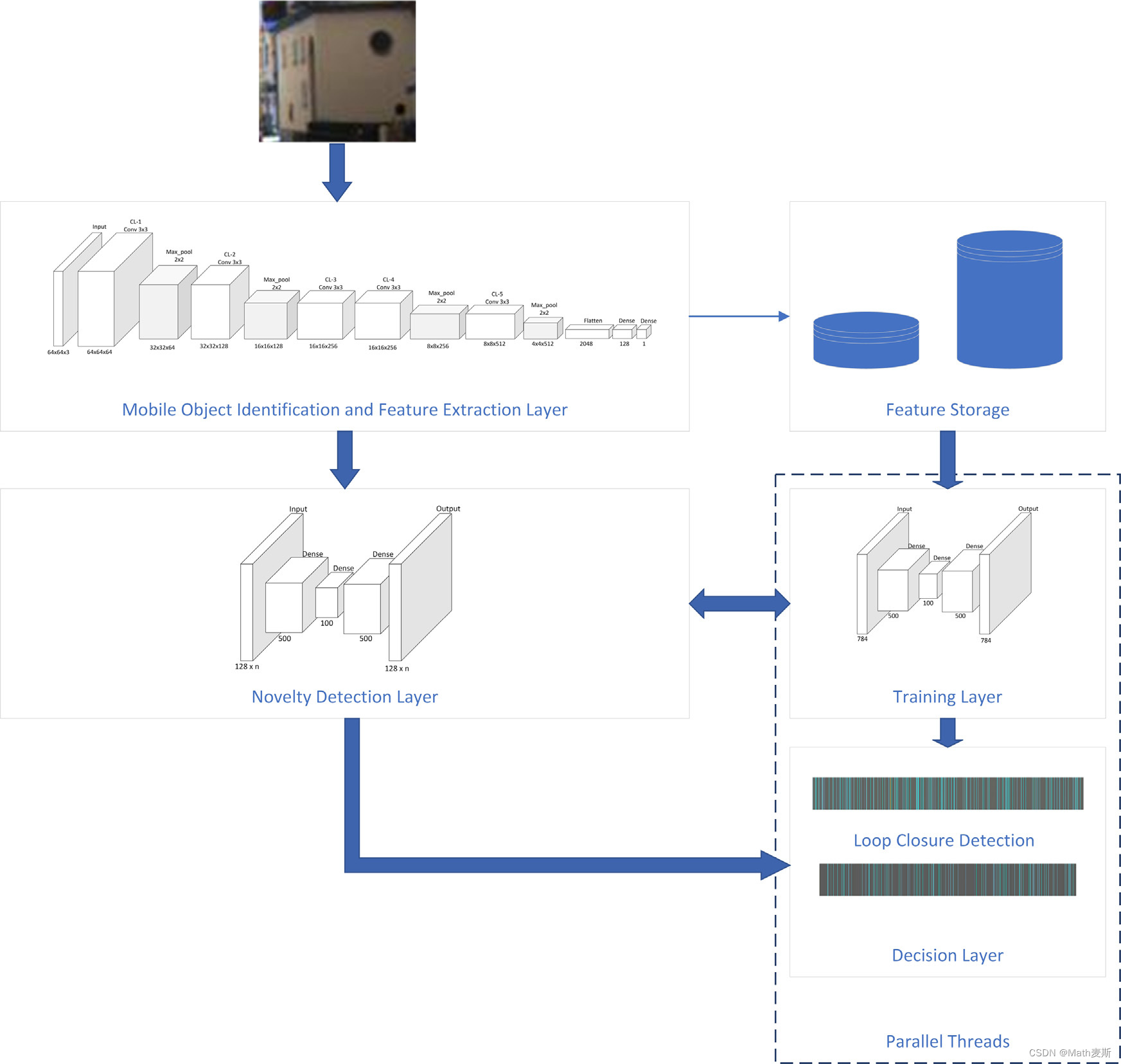
对于单目SLAM系统使用监督和无监督深度神经网络的回环检测
检测出正确的回环在视觉SLAM中是至关重要的,它能够帮助重定位、提高地图的精度、帮助配准算法获得更精准和一致的结果。这篇文章提出了一个新颖的方法,它基于和传统词袋(BoW)字典不同的超级字典,使用来自深度学习的更高级且更抽象的特征,并且不需要产生词汇。
Python 中使用 OpenCV 库来捕获摄像头视频流并在窗口中显示
python中使用opencv库来捕获摄像头视频流并在窗口中显示。
Python 使用环境下编译 FFmpeg 及 PyAV 源码(英特尔篇)
在 Python 使用环境下编译 FFmpeg 以及 PyAV 源码并启用 QSV 硬件加速。

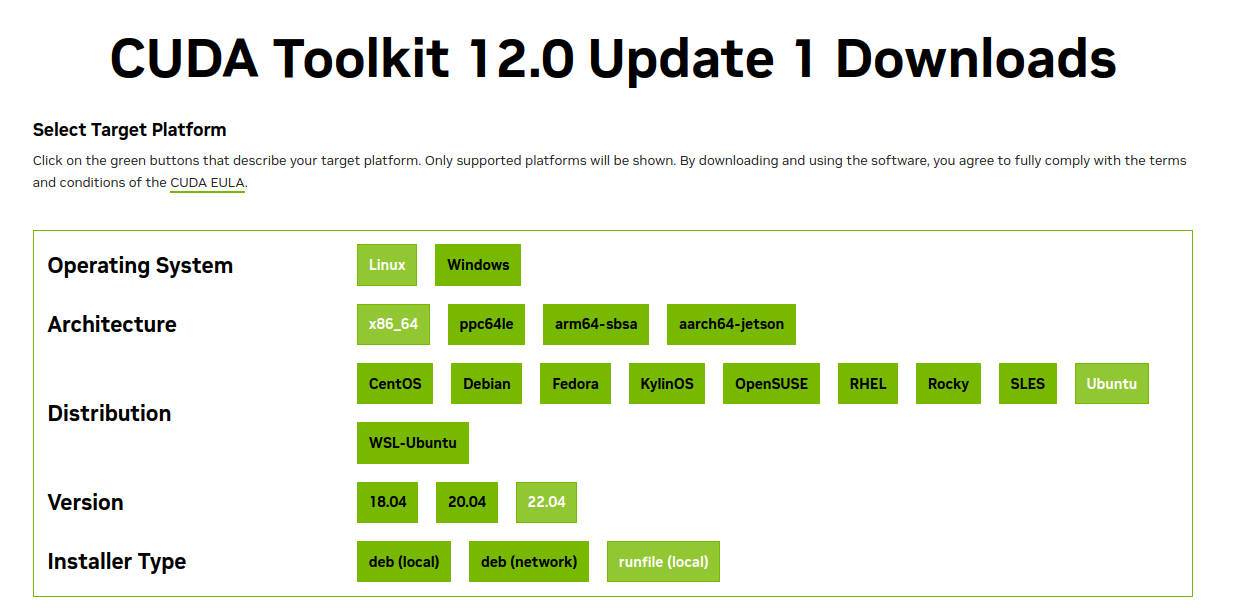
Ubuntu 安装 NVIDIA显卡驱动、CUDA 以及 CuDNN工具
ubuntu安装nvidia显卡驱动、cuda以及cudnn工具包
两种加速数据资源下载的方法
两种加速数据资源下载的方法
PointNetVLAD:基于深度点云的大规模位置识别检索
基于点云的位置识别检索相比于基于图像,仍然是一个没有被开发和解决的问题,它很庞大,因为从一个点云中提取出局部特征描述符并且能够再之后被编码到一个全局的描述符用于检索任务是很困难的。因此,在这篇文章中,结合最近比较成功的深度网络,提出了来解决基于点云的位置识别搜索。这个模型是现存的两个模型PointNet和NetVLAD的组合,可以进行端到端的训练并且能够从一个给定的3D点云中提取出全局的描述符来实