- @weixin_47151388
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
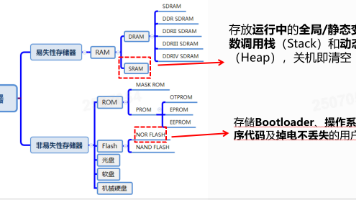
STM32H745采用双核架构(M7+M4),内存分为Flash(非易失性)和RAM(易失性)两类。Flash(2MB)存储程序代码和常量,地址从0x08000000开始;RAM包括专用高速区(如ITCM/DTCM)和共享区(AXISRAM/SDRAM),其中DTCM(0x20000000)为M7核心数据区。通过Keil的分散加载脚本可自定义存储布局,如将Bootloader置于0x8000000
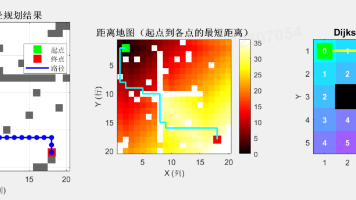
本文详细介绍了Dijkstra算法的原理与实现。该算法由荷兰科学家Dijkstra于1956年提出,用于解决带非负权值图的最短路径问题。文章通过示例演示了算法步骤:初始化距离数组,迭代选择最近节点并更新邻居距离,最终重建路径。MATLAB实现部分展示了在20x20网格地图上的应用,包含障碍物处理和可视化功能。测试结果显示,在13.5%障碍物比例下,算法耗时0.0072秒找到35步的最短路径。文中还
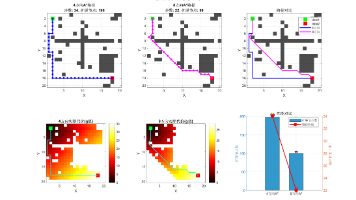
本文详细介绍了A路径规划算法的原理与MATLAB实现。A算法通过评价函数f(n)=g(n)+h(n)结合实际代价与启发估计,在保证最优性的前提下提高搜索效率。文章对比了4方向(曼哈顿距离)和8方向(对角线距离)两种移动方式的实现效果:在20×20网格地图中,8方向A找到的路径更短(22步vs34步),扩展节点更少(99vs198),效率提升50%。MATLAB实现包含完整算法流程、启发函数设计、路
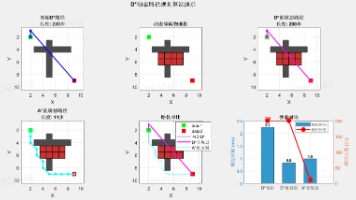
D算法(Dynamic A)是一种用于动态环境路径规划的增量式搜索算法,由Anthony Stentz在1994年提出。它在A*算法基础上增加了处理动态障碍物的能力。
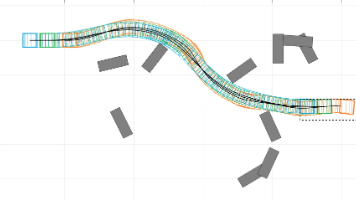
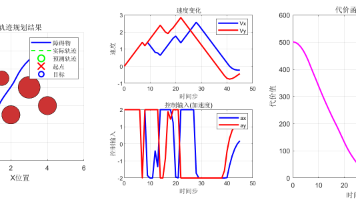
基于优化的路径规划方法,通过模型预测控制(MPC)实现高质量轨迹生成。该方法将路径规划建模为数学优化问题,在满足动力学约束的同时,确保轨迹平滑且安全避障。MPC采用滚动优化策略,通过预测-优化-执行的循环过程实时调整轨迹。文章详细阐述了算法实现,包括状态预测、代价函数设计和约束处理,并提供了MATLAB代码示例。实验结果表明,该方法能生成物理可执行、舒适安全的轨迹,适用于自动驾驶、无人机等需要高质
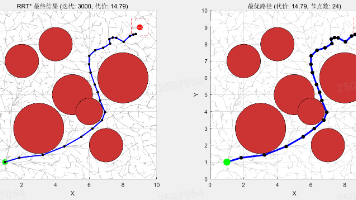
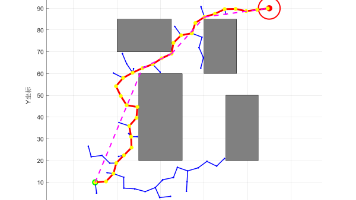
RRT算法是RRT的渐进最优改进版本,通过引入"父节点优化选择"和"近邻节点重连接"机制,在保证概率完备性的同时实现路径渐进最优。该算法通过采样、最近邻搜索、最优父节点选择和重连接等步骤,使路径质量随时间不断优化。MATLAB实现展示了算法在二维空间中的运行过程,包括障碍物规避、路径优化和可视化功能。相比RRT,RRT具有收敛到最优解的特性,但计算成本更高。
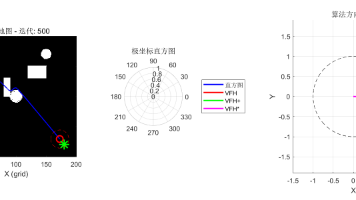
VFH算法是一种经典的局部路径规划方法,通过将二维避障问题降维为一维角度选择问题实现快速避障。其核心流程包括:构建直方图网格、生成极坐标直方图、基于代价函数选择最优方向。算法演进形成了VFH家族(VFH/VFH+/VFH*),在实时性、安全性和全局优化方面逐步提升。MATLAB实现展示了三种算法的对比,其中VFH*通过前瞻机制和成本函数获得最优路径。该算法适用于服务机器人、AGV等场景,具有计算量
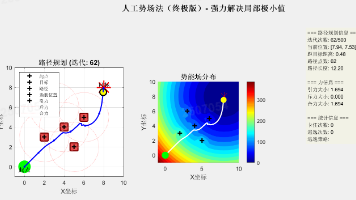
人工势场法是一种基于物理势场概念的路径规划算法,通过模拟引力(目标点吸引)和斥力(障碍物排斥)来引导机器人运动。该算法计算高效、响应迅速,适用于动态环境,但存在局部极小值和目标不可达等典型问题。改进版本通过优化参数设置、引入逃逸策略(如随机扰动、虚拟目标点等)以及简化环境布局,有效解决了这些问题。MATLAB实现展示了算法从基础到改进的完整过程,改进版本成功规划出避开障碍物到达目标的路径,验证了优
本文介绍了RRT(快速随机扩展树)算法的原理与实现。RRT是一种适用于高维空间路径规划的采样型算法,通过随机采样、最近邻搜索和逐步扩展的方式构建搜索树。算法流程包括初始化树结构、随机采样、节点扩展、碰撞检测等步骤,直到找到连接起点到终点的可行路径。MATLAB实现版本具有目标偏置、障碍物避碰、路径提取和平滑等特性,通过可视化功能可直观观察树的生长过程及最终路径。用户可通过调整起点、终点、障碍物等参
本文系统梳理了机器人路径规划的主要算法及其应用。经典算法包括基于图搜索的Dijkstra、A*等全局规划方法,以及基于采样的RRT、PRM等概率算法;局部规划算法着重介绍了动态窗口法、人工势场法等实时避障方法;现代智能算法涵盖强化学习等机器学习方法。文章还分析了多机器人协同规划策略,并指出算法选择需考虑环境动态性、最优性、实时性等因素。最后总结了路径规划面临的高维空间、不确定性等挑战,以及在服务机