




- @weixin_46812066
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
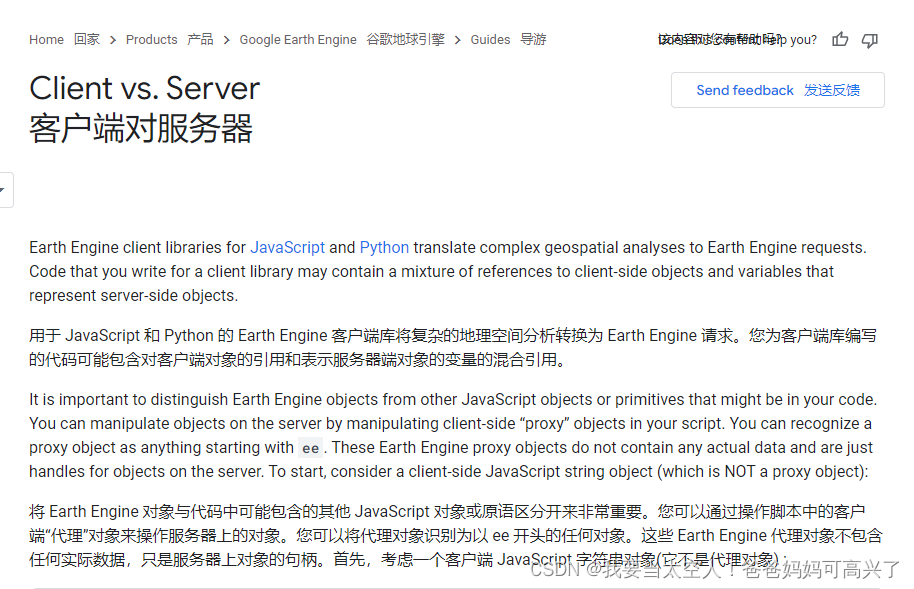
因为他带着GPU,同时服务器在欧洲,所以下载什么包都是刷一下就过去了。这个标题真的,微软员工看了都流泪,自己的产品上面装谷歌的东西。因为是刚刚装,所以需要干一件事情:配置许可。然后就一路确认安装就好,总共点了两次y。只需要运行四行代码,搞定一切。整个流程下来五分钟一定搞定!
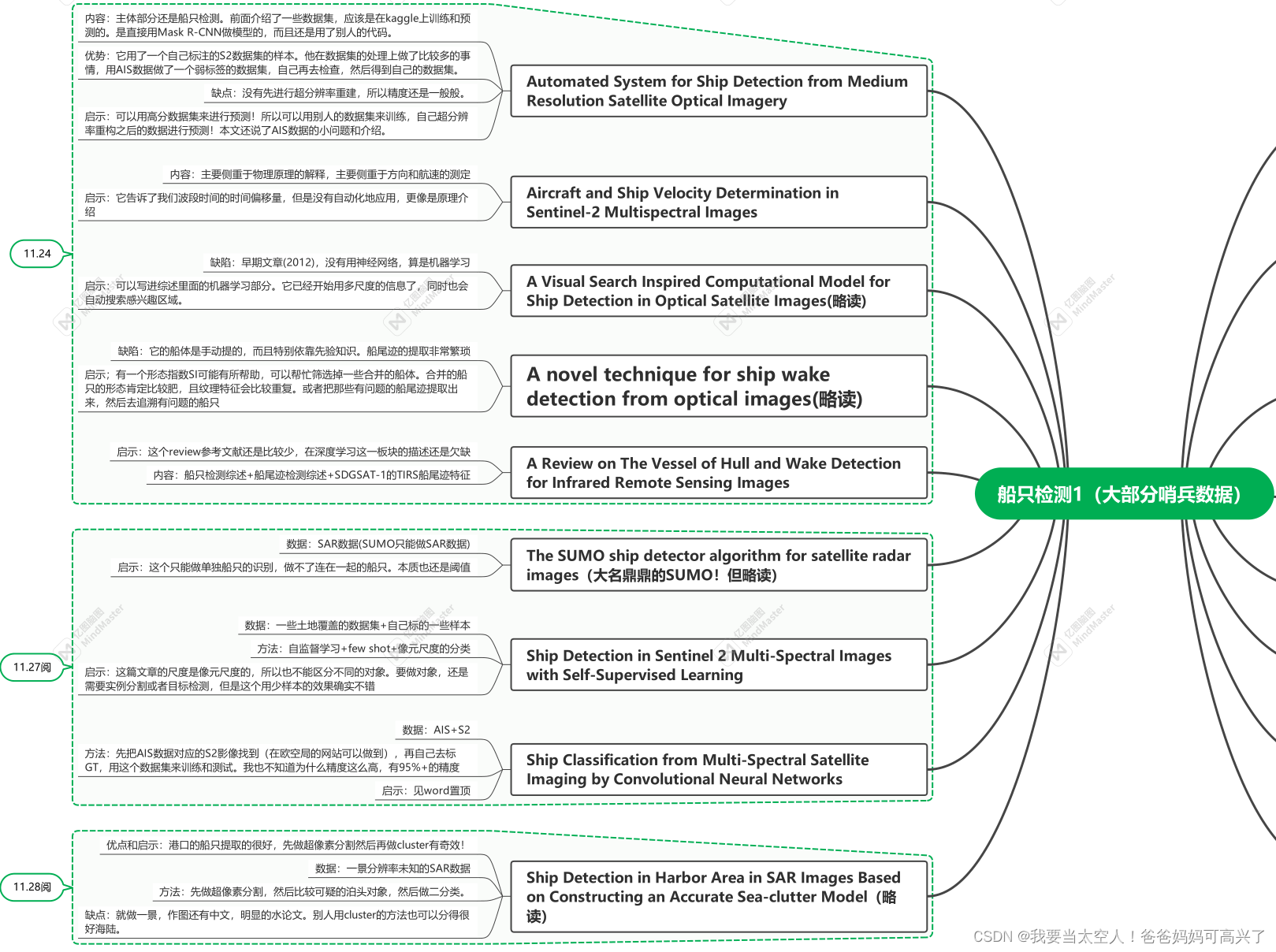
因为毕设做船只检测,应该就是用哨兵二号数据提取船只,所以阅读了很多这种文献。想做一个新的企划,叫做和我一起读文献(read with me!),分享最近读的所有文献,0代码,纯心得。后面几篇应该都是船只的文献阅读啦~大家可以根据思维导图上的论文名称来选自己感兴趣的。下面是画的思维导图。已经筛除了部分灌水论文。基本都是近5年的,基本都精读过。这么多篇读下来的感受是:深度学习YYDS!
目标检测的代码全集,按照时间顺序总结,各种经典的和不经典的都有。小目标检测终于来了!但这个是论文集,不是代码集或者包。大名鼎鼎的Transformer,这个包可以调用Deformable DETR。上面两个DETR的变种都对CUDA和GCC有要求。下文的格式就是:网址+内容介绍,让我们开始吧!基本你想到的方法都有了,同时也在持续更新!目标检测的论文集,按照时间顺序总结,截止至2020年全部。用来评
本文解决这个问题:EEException: A mapped function's arguments cannot be used in client-side operations。这个坑,我踩了四天。但是它是没有循环的,因此我想对很多个时间或者很多个位置去做的时候,就得写一个循环套上去。好了问题来了。这个例子里面很多的getInfo,埋下了很多坑。
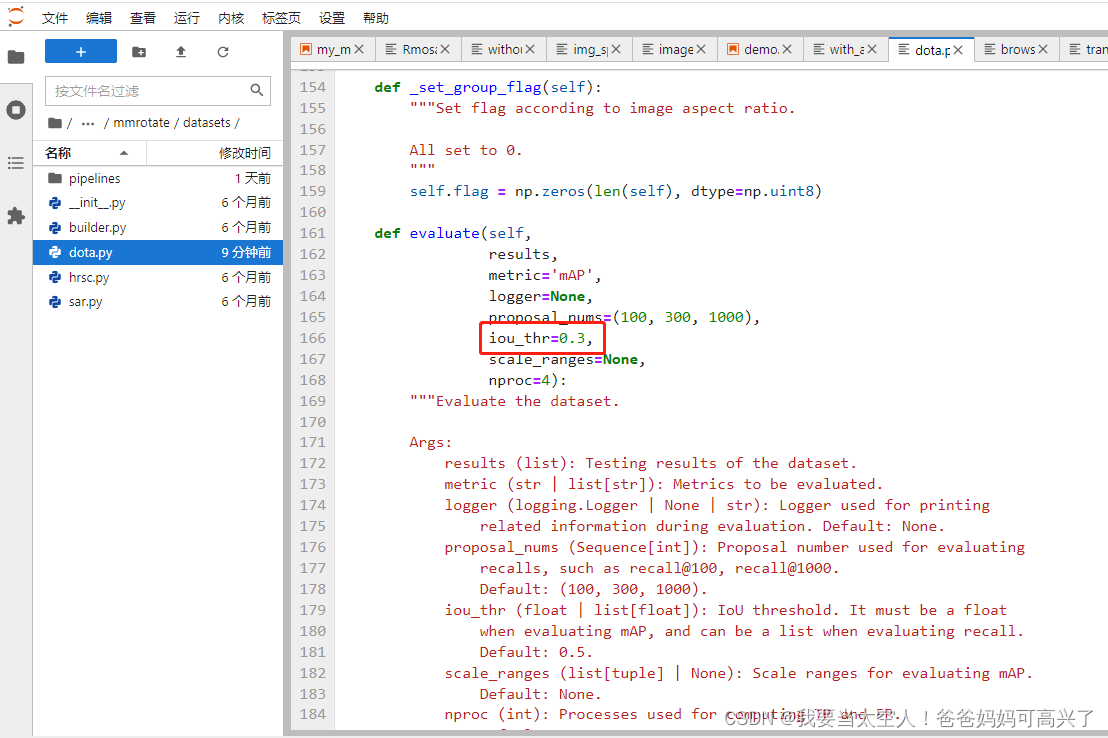
如果有时候效果不错,但mAP很低,且recall也很低,这时候可能得调一下这个iou_thr,才可以让mAP好看一点。原来默认是0.5的,现在改成了0.3,马上就好看起来了。
Google earth engine(GEE):计算一定时间序列的城市热岛强度(UHI),并绘制直方图;时间序列分析;城市热岛分析;join函数的使用;计算像元面积,均值

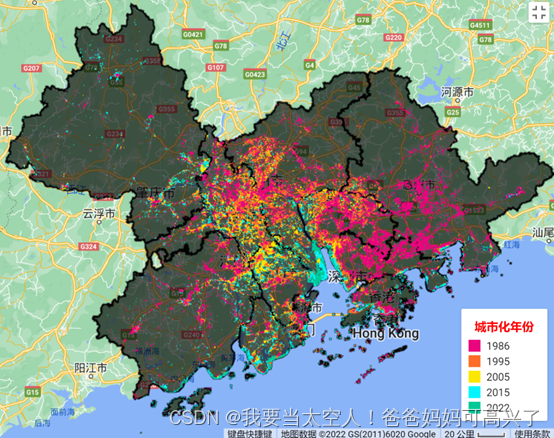
城市不透水面提取及制图,含代码!重点讲解NDBI的计算~
Google earth engine(GEE):计算一定时间序列的城市热岛强度(UHI),并绘制直方图;时间序列分析;城市热岛分析;join函数的使用;计算像元面积,均值