




- @weixin_46300916
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
摘要:本文详细介绍了FANUC ROS2_control驱动程序的使用指南,包括环境配置要求、快速入门步骤和功能特性。该驱动支持FANUC机器人控制器的高速运动控制、周期性I/O控制及异步命令,基于ROS2框架构建。文章涵盖了系统要求(Ubuntu 22.04、ROS2 Humble)、支持的机器人型号(CRX/LRMate/R/M系列)、控制器软件版本和网络配置等内容,并提供了从源码编译安装到物

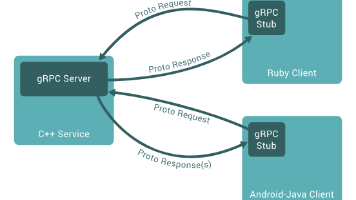
本文是gRPC框架的Python开发指南,主要包含以下内容:1. gRPC概述:介绍gRPC作为现代RPC框架的核心优势,包括多语言支持、高效传输、双向流式通信等特性。2. 快速入门:通过Hello World示例演示安装配置、服务定义、代码生成到运行应用的完整流程。3. 基础教程:详细讲解四种RPC模式(简单RPC、流式RPC等)的实现方法,包含服务端和客户端代码示例。4. 高级功能:包括ALT
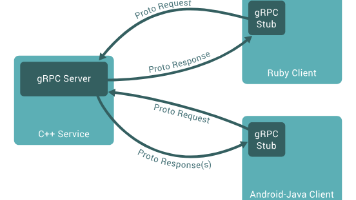
gRPC是现代开源高性能远程过程调用(RPC)框架,支持多种语言和跨环境通信。文章系统介绍了gRPC的核心概念、应用场景和优势:1) 采用协议缓冲区定义服务接口,支持四种通信模式;2) 基于HTTP/2协议,提供双向流式传输;3) 具有负载均衡、健康检查等可插拔功能。内容涵盖入门指南、架构设计、RPC生命周期及常见问题,特别适合构建低延迟、高扩展性的分布式系统。gRPC源自Google内部技术,现
本文摘要: ROS2_control框架硬件接口开发指南详细介绍了硬件组件的开发流程与配置方法。主要内容包括:1) 硬件组件生命周期管理,包含UNCONFIGURED、INACTIVE、ACTIVE和FINALIZED四种状态及其转换;2) 硬件接口类型,涵盖关节、传感器、GPIO等组件的XML配置语法;3) 硬件组件开发步骤,从创建软件包到实现各生命周期方法;4) 高级特性如多速率更新、异步运行

本文摘要: ROS2_control框架硬件接口开发指南详细介绍了硬件组件的开发流程与配置方法。主要内容包括:1) 硬件组件生命周期管理,包含UNCONFIGURED、INACTIVE、ACTIVE和FINALIZED四种状态及其转换;2) 硬件接口类型,涵盖关节、传感器、GPIO等组件的XML配置语法;3) 硬件组件开发步骤,从创建软件包到实现各生命周期方法;4) 高级特性如多速率更新、异步运行
本文介绍了行为树的概念及其在机器人决策中的应用。行为树是一种模块化决策引擎,具有时钟机制、优先级处理、结构简洁等核心特性,适用于游戏AI和机器人控制。文章重点讲解py_trees库的行为树实现,包括行为节点的基本骨架、生命周期管理(setup/initialise/update/terminate方法)、状态机制和反馈消息系统。同时详细介绍了三种关键复合节点:选择器(优先级决策)、序列(顺序执行)
本技术报告的重点是 (1) 将所有类型的视觉数据转换为统一表示,以便对生成模型进行大规模训练的方法,以及 (2) 对索拉的能力和局限性的定性评估。该报告不包括模型和实现细节。许多先前的工作使用各种方法研究了视频数据的生成建模,包括循环网络,[1][2][3] 生成对抗网络,[4][5][6][7] 自回归变压器,[8][9] 和扩散模型。[10][11][12] 这些工作通常侧重于视觉数据的一个狭

前言本篇文章分为2个部分,第一部分主要搭建了机器人的仿真环境(ROS2 MuJoCo等),运行了机械臂及移动机器人相关示例程序;第二部分运行了OrangePi AIpro系统自带的示例程序及昇腾社区官方的示例程序;最后总结使用体验。 一、开发板软硬件 1.1 硬件介绍及准备这里我找了几块开发板,左边为
