
写文章




- @weixin_46190814
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
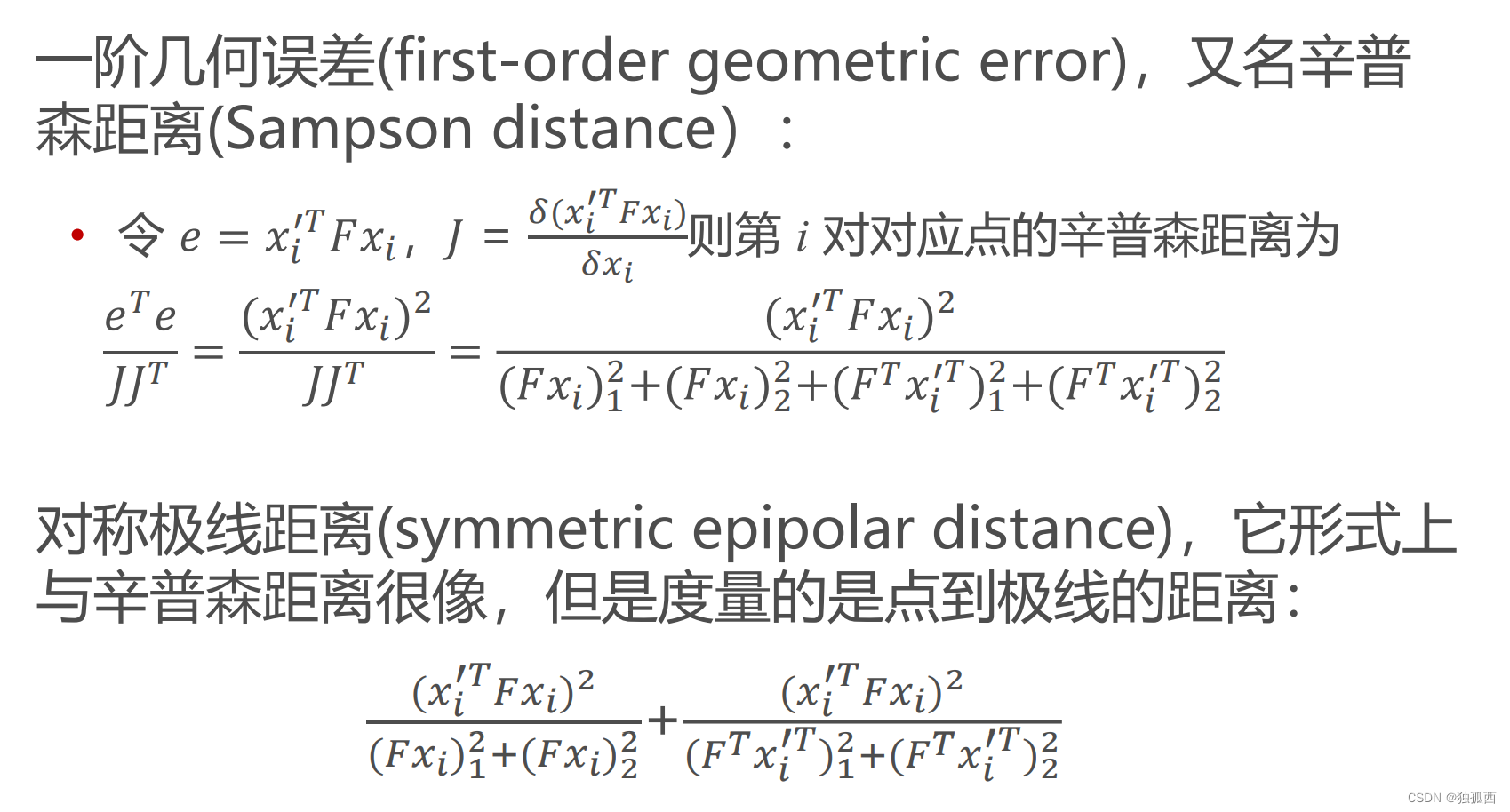
辛普森距离(SD,Sampson Distance)
本文介绍了对极几何中经常用到的一阶几何误差,又称辛普森距离,并引出了一篇在VIO中利用SD进行视觉残差计算的论文。
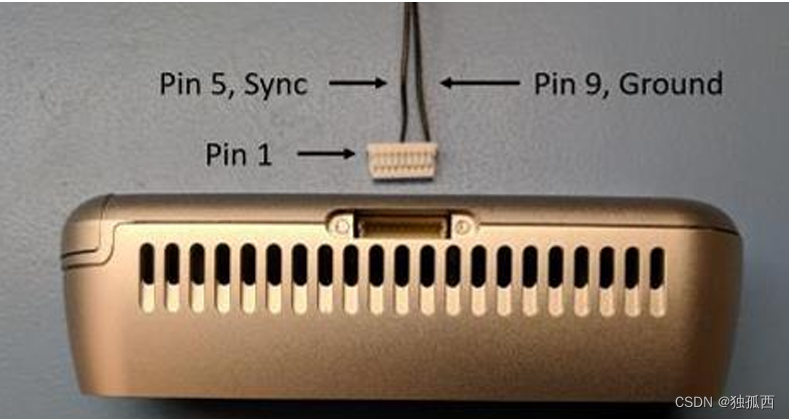
realsense D435i 实现外部时钟触发硬件同步多相机数据采集
利用D435i相机,基于librealsenseSDK进行外部时钟硬件触发的多相机数据采集,包含D435i相机能采集到的所有数据:深度、彩色、双目灰度、加速度计、陀螺仪。
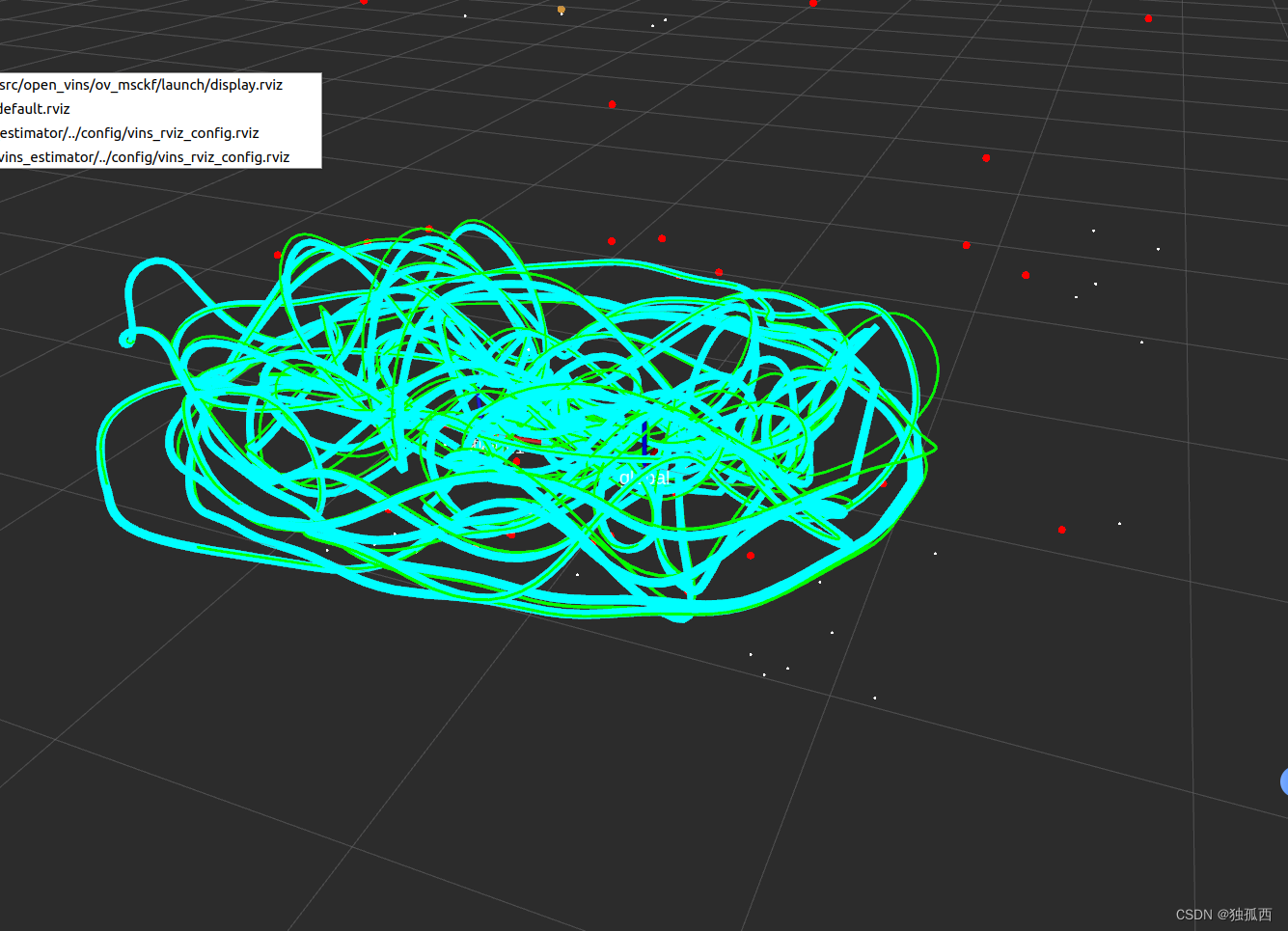
OpenVINS学习1——数据集配置与运行
OpenVINS学习记录1
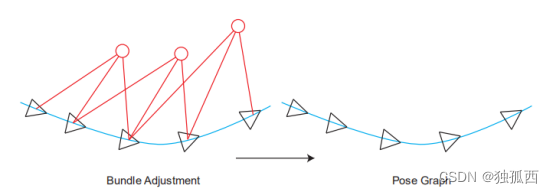
Ceres库与位姿图优化
主要是ceres库的初步使用方法介绍
pytorch图像分类实战之构建数据集
参加了一月份Datawale的组队学习,选择了pytorch图像分类实战的教程,第一个任务是构建图像分类数据集。
Fisher信息理论与应用
Fisher信息的原理介绍。

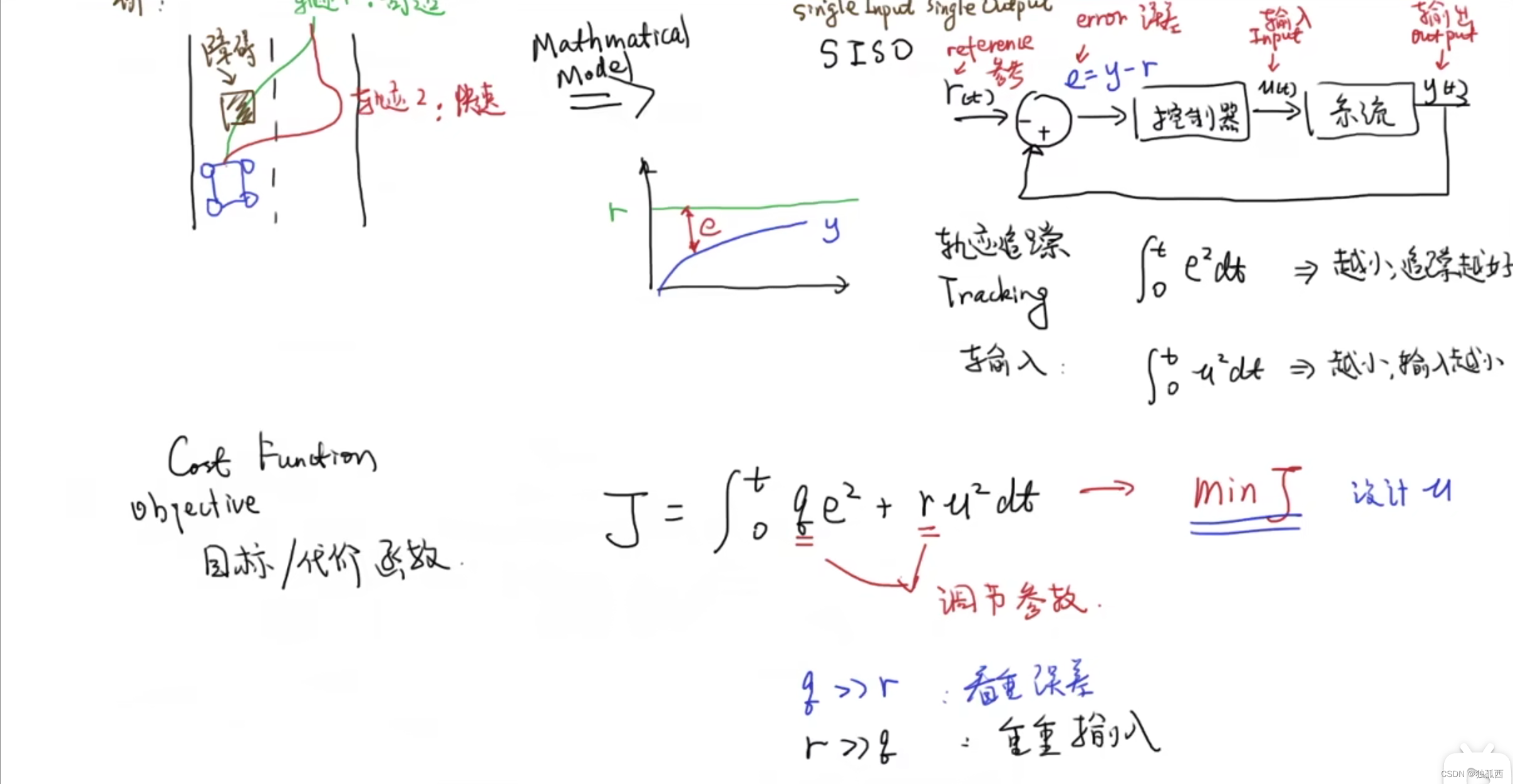
MPC模型预测控制理论与实践
MPC主要包含三部分,建模、预测、控制。其中建模在机器人中主要就是指运动学模型和动力学模型,预测也既是通过系统当前的状态和后续的控制输入来预测未来一段时间内的系统状态量,控制则是通过优化控制输出来使得预测出来的系统状态尽可能贴近期望值。MPC的优化控制是一个滚动优化的过程,在系统的每个采样周期都会进行一次优化计算,拿到当前帧的状态值,预测固定时间之内的状态。
OpenVINS学习1——数据集配置与运行
OpenVINS学习记录1
到底了