- @weixin_45477686
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
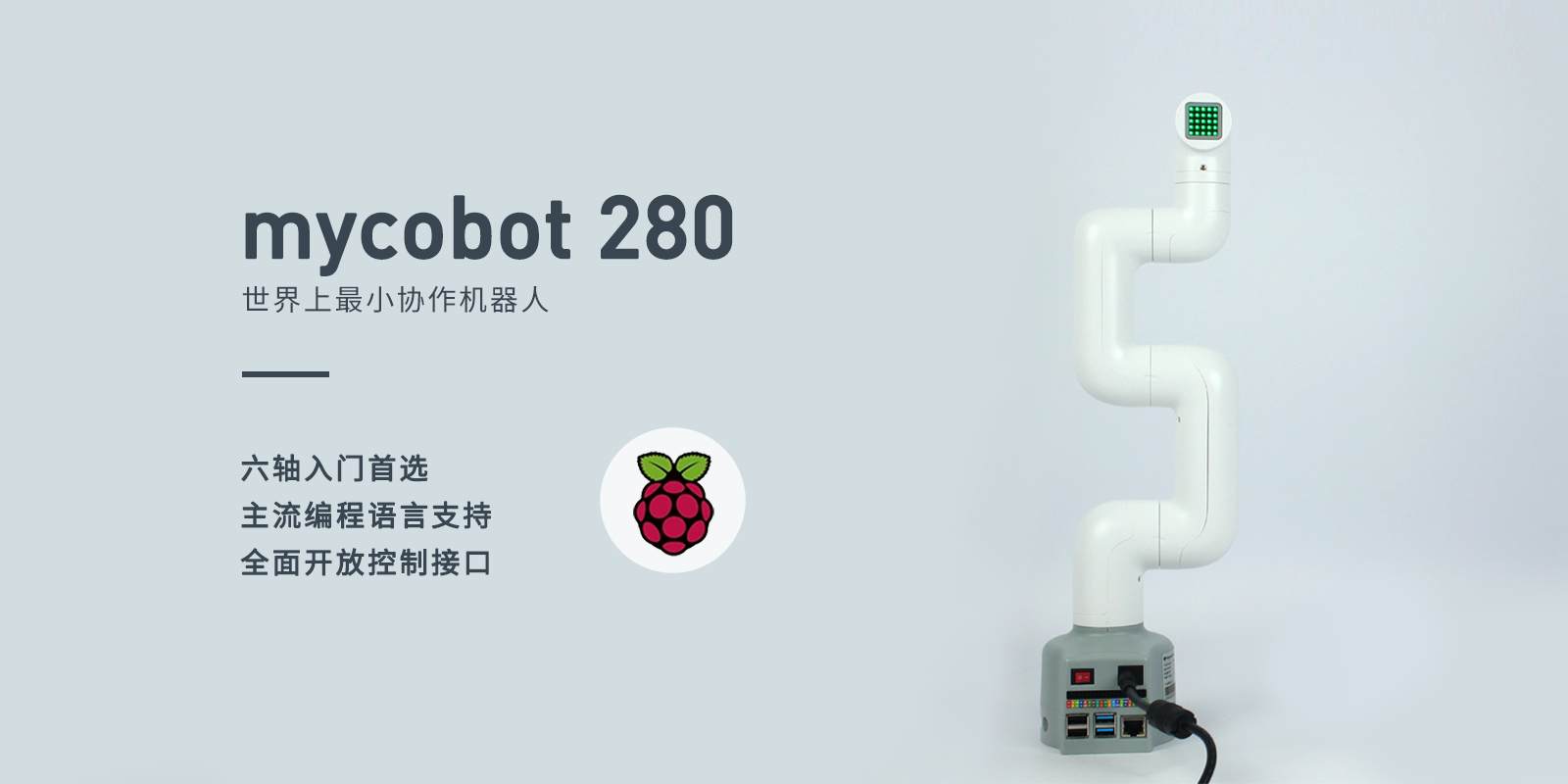
表示的是机械臂头部在该点的姿态(该坐标系为欧拉坐标)。算法的实现以及欧拉坐标的表示需要一定的学术知识,这里不对其过多的讲解,我们只要懂得直角坐标系就可以很好的使用这个函数了。在设置坐标时,不同系列的机械臂关节构造有所不同,同一组坐标,不同系列的机械臂会展示不同的姿态。主要用于实现智能规划路线让机械臂从一个位置到另一个指定位置。表示的是机械臂头部在空间中的位置(该坐标系为。下面是MyCobot控制代
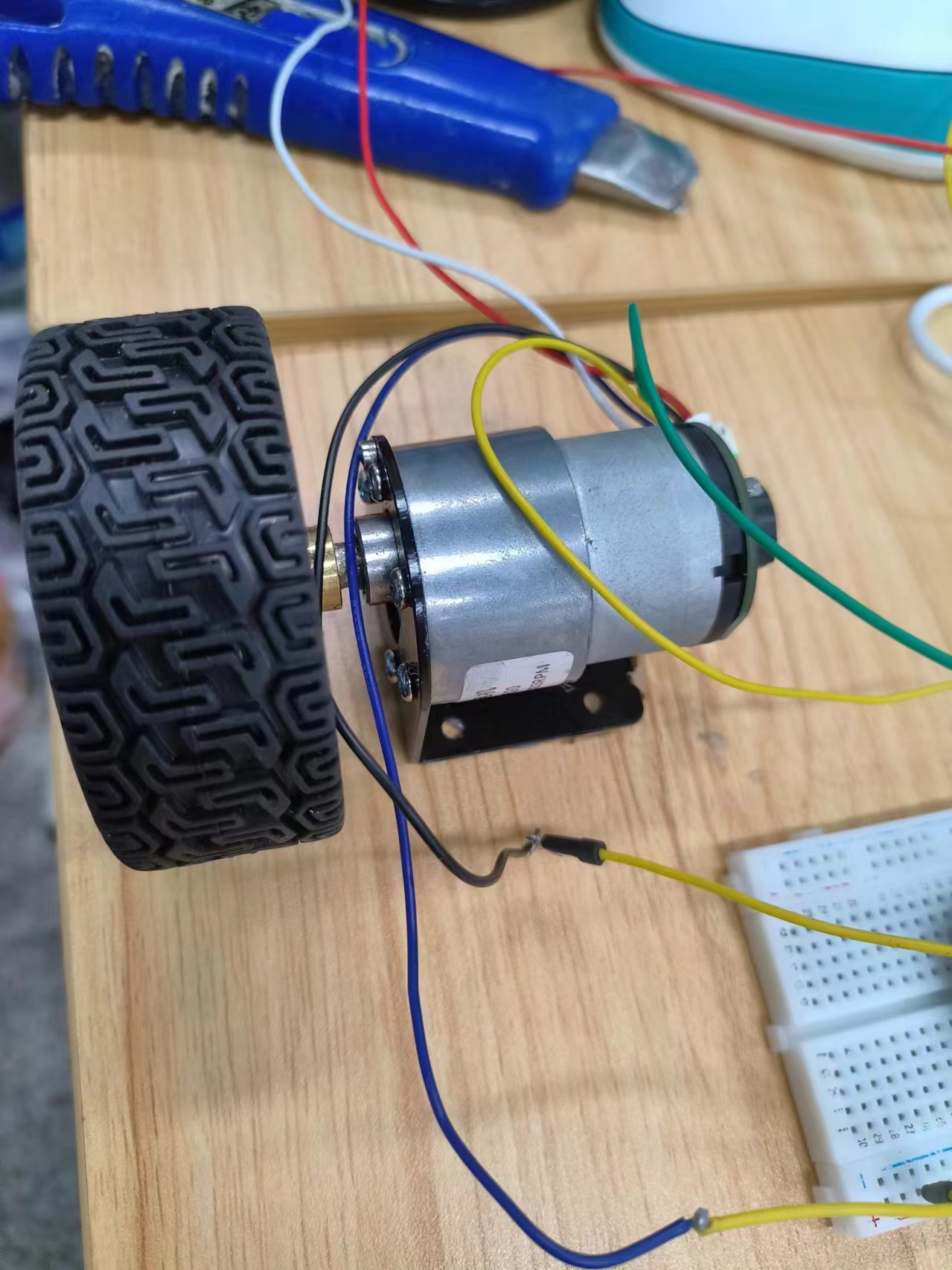
使用JGB37-520直流减速电机,霍尔编码器(磁式),通过代码获取到电机旋转的数值
ROS通信------基于物联网(单片机)与手机通信,物联网通信使用的是对于MQTT的使用可以查阅博主的物联网MQTT通信------Easy IoT、SIoT左边是博主3D打印一个外壳 套住了,外观没有太精美,中间是博主自己做的APP,功能暂未完善,右边是用别的公司的机械车,所以还没有开源,右边是用别的公司的机械车,如果需要或者有想法可以联系博主!

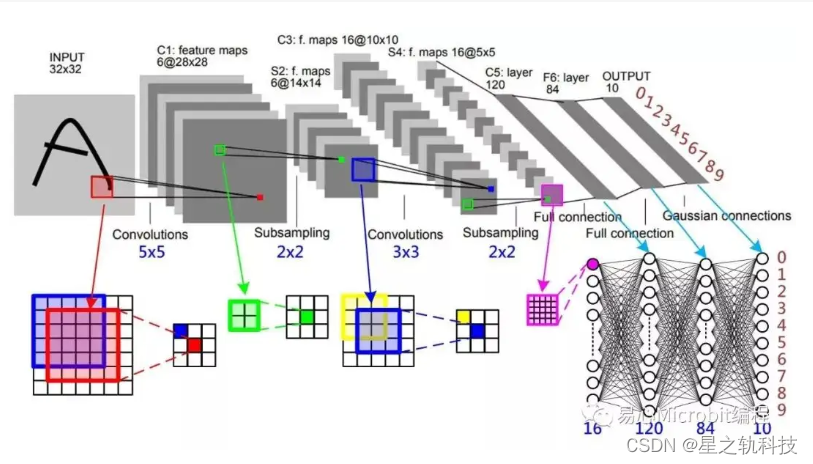
使用keras CNN卷积神经网络------搭建mnist手写数字识别网络
open-vm-tools和open-vm-tools-desktop关系。执行完这四个步骤后你的虚拟机终端就可以与电脑主机互相复制粘贴。

在这次的项目开始时,我们使用了ESP32开发板,当然,需要给设备联网,这个在代码中添加,在,需要连接一个可以访问网络的WiFi,只需要提供一个WiFi就可以,形成局域网,手机电脑的WiFi都可以。
在这次的项目开始时,我们使用了ESP32开发板,当然,需要给设备联网,这个在代码中添加,在,需要连接一个可以访问网络的WiFi,只需要提供一个WiFi就可以,形成局域网,手机电脑的WiFi都可以。