




- @weixin_44190648
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
4. 打开终端,输入命令,解决问题。

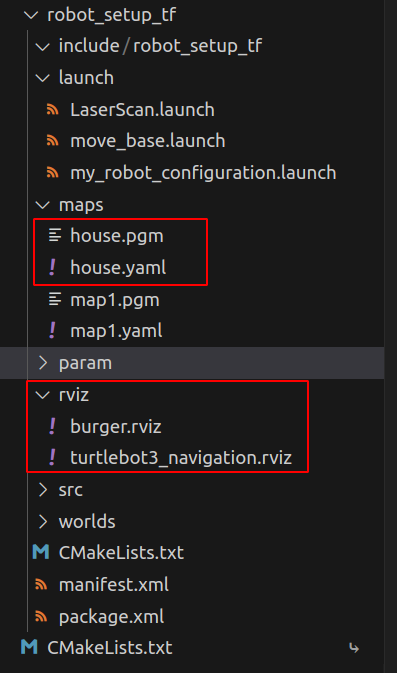
worlds对应gazebo模型;maps对应rviz模型;3、load_navigation.launch文件中。1、load_mapfile.launch 文件中。
4. 打开终端,输入命令,解决问题。
二维数组1.定义://方法一int arr1[2][3];//方法二int arr2[2][3] = { {1,2,3},{4,5,6} };//方法三int arr3[2][3] = { 1,2,3,4,5,6 };//方法四int arr4[][3] = { 1,2,3,4,5,6 };2.数组名称作用:查看二维数组所占内存空间大小;获取二维数组首地址。int arr[2][3] = { {1
URDF:Unified Robot Description Format,统一机器人描述格式。描述机器人某个刚体部分的外观和物理属性。尺寸(size)、颜色(color)、形状(shape)、惯性矩阵(inertial matrix)、碰撞参数(collision properties)。2.描述机器人关节的运动学和动力学属性。包括关节运动的位置和速度限制。根据关节运动形式,可将其分为
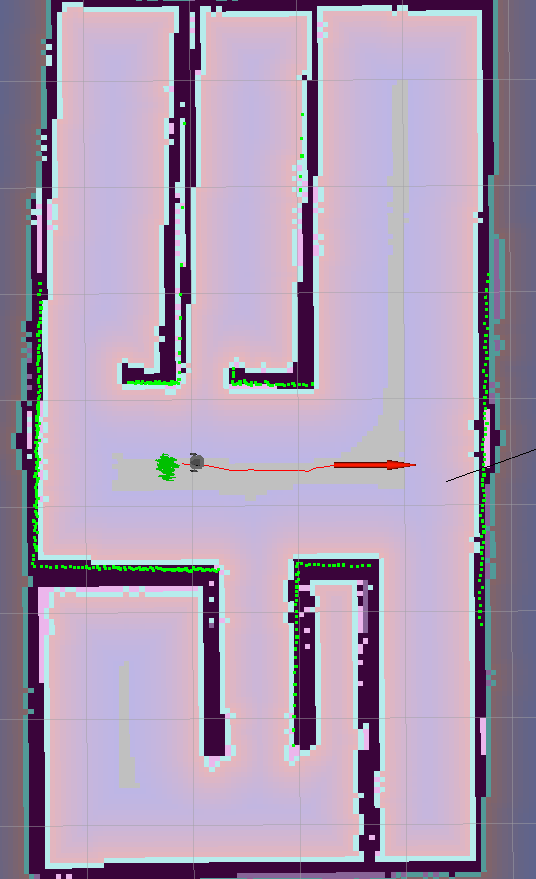
ROS:turtlebot3机器人倒着跑,原因和解决方案
话题与服务编程:通过代码新生一只海龟,放置在(5,5)点,命名为“turtle2”;通过代码订阅turtle2的实时位置并打印在终端;控制turtle2实现旋转运动;

问题描述:运行命令:roslaunch display_mbot_base_urdf.launch出现错误:解决方法:修改launch文件:<!-- 运行robot_state_publisher节点,发布tf--><node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publishe
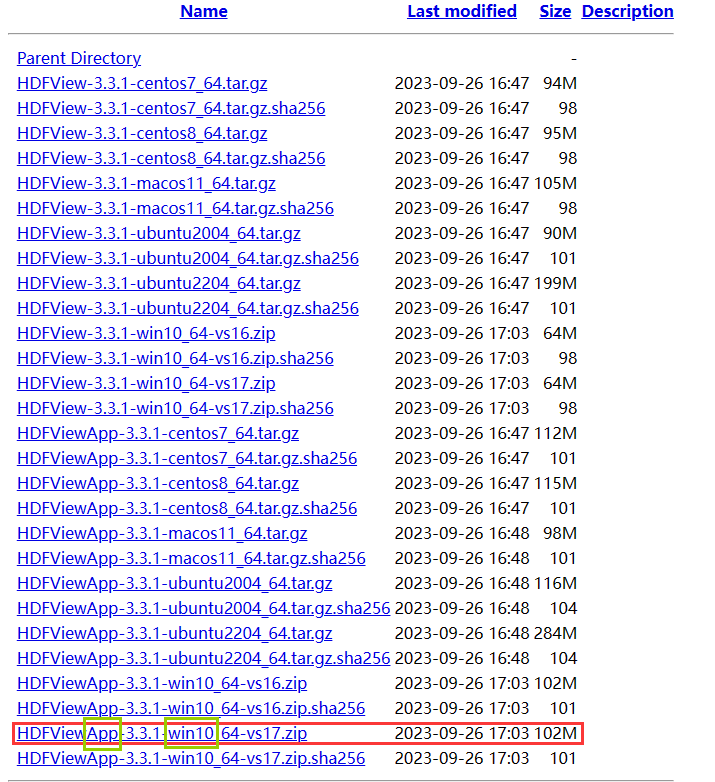
我们需要下载 win10 、App软件(win10在win11也能运行),因为App软件是轻量版,不需要安装就可以使用。下载完后解压就可以使用。
一.开发软件1.LiteIDE2.golang下载地址:https://golang.google.cn/dl/选择mis版本。下载成功后,一路下一步,但是注意,安装地址目录不能出现中文。二.验证golang是否成功1.用记事本写如下代码,然后将hello.txt改为hello.go。注意右下角编码为UTF-8。2.输入cmd打开命令提示符。3.cd到之前hello.go目录下。4.输入代码go