




- @wangyx1234
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
VScode 开发ESP32平台的 Arduino 程序
安全的话题可以从完整性、机密性、合法性、不可否认性四个方面进行讨论;不同的安全风险需要不同的安全组件来抵抗风险。机密性保护可以使用对称密钥、非对称密钥来实施保护方案。对称加密有着执行速率快,资源消耗小的特点,但是前提是通信双方提前知道密钥;非对称加密有可以让初次通信的双方立即建立加密通信的优势,但是通信过程复杂,加解密比较消耗资源;AES XTS 分组加密模式使用两个 AES 密钥。一个密钥用于执

VScode 开发ESP32平台的 Arduino 程序
芯片与模组的区别与联系。模组与开发板的区别与联系。芯片到模组,模组到开发板的演变原因与过程。一文带你了解芯片是什么、模组是什么、开发板是什么。芯片和模组有什么区别或差异。
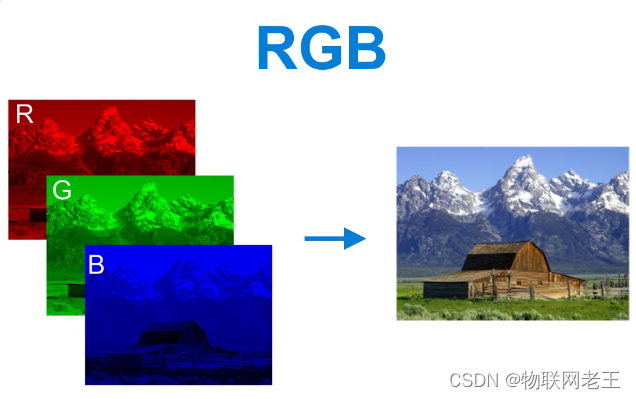
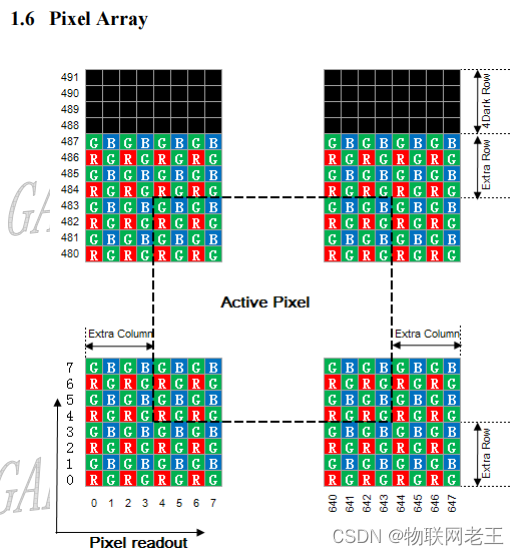
1)本文从摄像头工作的基本原理说起,讲述 RAW、RGB、ARGB、RGB24 等数据格式的定义。2)RAW 格式的数据,根据对每种颜色的表示使用几个 bit,也可以分为 RAW8、RAW10、RAW12 等类型。3)RGB 数据是 RAW 数据组合得到的,根据组合顺序,可以组合得到 RGB、BGR 等格式的数据。4)一些应用场景需要的数据带宽小、或者需要采集的颜色类型不多,这种情况下可以使用数据
安全的话题可以从完整性、机密性、合法性、不可否认性四个方面进行讨论;不同的安全风险需要不同的安全组件来抵抗风险。机密性保护可以使用对称密钥、非对称密钥来实施保护方案。对称加密有着执行速率快,资源消耗小的特点,但是前提是通信双方提前知道密钥;非对称加密有可以让初次通信的双方立即建立加密通信的优势,但是通信过程复杂,加解密比较消耗资源;AES XTS 分组加密模式使用两个 AES 密钥。一个密钥用于执
1)本文讲述了几种控制 Camera 系统的输出图像尺寸-分辨率的方法,包含 windowing、Cropping、Skip、Subsample、Scale、Binning 几种方法。2)不同的 sensor 、不同的 Camera 系统支持的控制输出尺寸的方法不同。不同的方法对图像的视场角、帧率、图像质量等的影响也不同。大家应该结合具体 sensor 的特性、产品需求使用合适的方法。
Ring Buffers基本结构即环形缓冲区:添加环形缓冲区是为了提供一种可以接受任意长度条目的缓冲区形式。 (内存管理)是一种数据结构用于表示一个固定尺寸、头尾相连的缓冲区,适合缓存数据流。内部除维护一个环形缓冲区外,还有两个二值信号量,用于读写保护:1.发送保护信号量:二值信号量,通知被阻塞发送的任务有更多可用空间或阻塞已经超时。2.接收保护信号量,二值信号量,通知被阻塞接收的任务指示新的数据
WiFi在AP模式获取自身IP、修改自己的IP,剔除指定id的STA。内附WLAN、WiFi基础学习链接。
基于 ESP32 学习 FreeRTOS 的使用.裸机编程 VS FreeRTOS 系统编程。包括:任务的创建与使用。任务间通信与同步。任务与中断的通信与同步。任务、中断之间共享资源的保护与互斥。时间管理,定时器、看门狗、内存块的使用。系统、驱动编程示例。
