- @vfatfish
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
在人脸检测方面,可选择开源或商用的成熟算法,或自行训练轻量化模型。
:性能数据基于实验室及典型场景测试,实际效果可能因环境有所差异。
tts_model.speak(response['message']['content']) # 本地 TTS。text = asr_model.transcribe(audio_input) # 本地 ASR。运行 7B(70亿参数)模型对边缘设备的 NPU 和内存带宽是巨大考验。这将把通用的 PyTorch 模型转换为 RK3576 NPU 能识别的 .rkllm 格式。为了激活 6TOPS
它将冰冷的辅助器具变成了能听懂指令、能看清危险的智能机器人,为老年人提供了更有尊严、更安全的出行方式。针对手部不便的老人,语音是最好的交互方式。解决了安全行驶问题,通过。的智能轮椅方案,通过。降低了使用门槛,通过。根据电鱼智能产品手册,
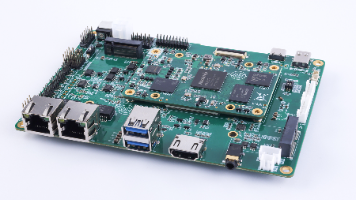
在 ROS2 机器人架构中,我们需要一个既能处理 LIDAR 点云数据,又能进行 AI 推理,同时还能可靠控制底盘的中央单元。打开了 AI 机器人的大门。对于正在寻求 x86 替代方案的 AMR 厂商而言,这是实现降本增效的最佳技术路径。ROS2 的 Navigation2 导航栈通常只处理静态障碍物。,开发者获得了一套“算力强劲、接口丰富、工业可靠”的机器人开发平台。AMR 机器人常在仓库、工厂
优势,解决了传统触摸屏“反应慢、甚至卡死”的痛点。对于追求高性能交互和数据安全的高端装备(如锂电设备、数控机床),这是一种极具竞争力的国产化替代方案。电鱼 eFish-SBC-RK3568 支持 Linux (Buildroot/Ubuntu) 和 Qt 5.14/5.15。的 Qt HMI 方案,不仅实现了与 PLC 的稳定 Modbus TCP 通讯,更利用其。// 定时读取:每 100ms
⚙️ 该平台在 15W 功耗下即可运行复杂的视觉AI模型和实时路径规划算法,实现“AI视觉识别 + 路径规划 + 实时运动控制”三位一体方案,💡 RK3588 的 NPU 可在本地完成视觉检测推理,延迟仅。:支持 Modbus / CANopen / EtherCAT;支持MIPI摄像头、SSD存储、Wi-Fi / 5G通信。Mali-G610,支持OpenCL / Vulkan。让机器人具备“
在人脸检测方面,可选择开源或商用的成熟算法,或自行训练轻量化模型。
⚙️ RK3568核心板具备高能效比,可实现人脸检测、特征比对、门禁控制的本地一体化处理,📈 模型识别速度可达 100ms/人,识别准确率 > 99%。同时通过网络同步数据至监控中心,形成完整的工地人员管理闭环。→ [5] 记录时间与身份 → [6] 上传数据至中心平台。[1] 摄像头捕捉人脸 → [2] AI模型特征比对。→ [3] 比对成功 → [4] 输出继电器信号开门。:标准GPIO/R
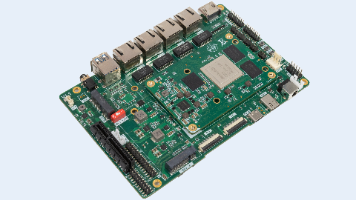
车路协同的核心在于“快”。当路侧设备发送“前方 200 米有行人闯红灯”的警告时,OBU 必须在毫秒级内完成消息解密、坐标转换、路径规划并触发 ADAS 预警。V2X 是典型的“通信密集型”应用。EFISH-CORE-RK3588 在网络接口上的配置堪称豪华,解决了数据“进得来、出得去”的问题。搭载了 Rockchip 旗舰级 SOC,其 CPU 架构为 V2X 提供了强大的多任务处理能力。除了通