




- @u012133341
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
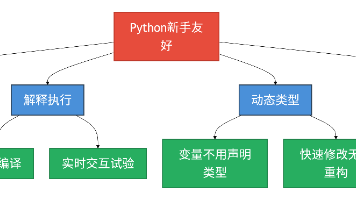
编程语言有上百种,但过去几年里,TIOBE 编程语言排行榜的第一名几乎只有一个名字:Python。TIOBE 指数根据搜索引擎上某一语言的搜索结果量,反映该语言的热度与关注度。Python 长时间霸榜,不是因为它诞生得晚,而是因为它恰好站在了这三条曲线的交汇点上。。下面一个个拆开说。

让我们用最后一张图,把今天探索的所有内容收束起来:fill:#333;important;important;fill:none;color:#333;color:#333;important;fill:none;fill:#333;height:1em;Algorithm of Thoughts 总览成功死路有潜力问题输入如: 24点 [8,6,4,4]Step 1: 分解选择两个数操作Step
C++23 通过这些特性,使 C++ 更接近函数式和高性能语言的理想。如果你处理高性能 I/O、多维数据或错误链,升级值得。目前,GCC 11+(-std=c++23)、Clang(C++23 支持良好)和 MSVC(库特性领先)均支持大部分特性。对于生产,检查特定编译器版本;若依赖 C++20,C++23 是自然升级,提升效率和安全性。
扩散模型通过迭代去噪过程生成样本,该过程需要数百至数千步的神经网络前向传播,计算效率成为实际应用瓶颈。流匹配方法直接学习连接先验分布与目标分布的常微分方程向量场,将生成过程转化为确定性轨迹积分,支持单步或少步数生成,显著降低推理延迟。
两种酶设计策略——EnzyControl的刚性约束与EnzyGen的柔性生成——分别适用于对几何精度要求极高的金属催化体系和对骨架柔性要求较高的底物诱导契合体系,为理性酶工程提供了可计算的实现路径。严格约束方法将活性位点的每个催化原子位置视为不可侵犯的硬边界,扩散过程在这些边界内填充蛋白质结构,适用于需要极高几何精度的金属酶或共价催化体系。模型通过分层降噪策略,优先固定催化残基的骨架原子位置,再逐
答案是 Python。不是因为它最强大,而是因为它把门槛降到了最低,让你第一天就能写出能跑的程序。—— 读代码差不多等于读句子—— 不用等着“编译”,改一行立马看到效果—— 别人写好的功能,你拿过来就用。
编程语言有上百种,但过去几年里,TIOBE 编程语言排行榜的第一名几乎只有一个名字:Python。TIOBE 指数根据搜索引擎上某一语言的搜索结果量,反映该语言的热度与关注度。Python 长时间霸榜,不是因为它诞生得晚,而是因为它恰好站在了这三条曲线的交汇点上。。下面一个个拆开说。
3D高斯点云渲染(3D Gaussian Splatting, 3DGS)是2023年提出的革命性神经渲染技术,2025年已成为具身智能中实时场景重建的核心方法。其核心思想是将三维场景表示为一组可微分的3D高斯分布,而非传统的神经辐射场(NeRF)中的隐式函数。
深入卷积神经网络原理,详解ResNet、EfficientNet等骨干网络设计,覆盖目标检测(YOLO/Faster R-CNN)、语义分割(U-Net/DeepLab)、实例分割等核心任务。探索Transformer视觉模型(ViT/Swin)、自监督学习、神经辐射场(NeRF)及多模态大模型(CLIP/SAM)等前沿方向,剖析注意力机制与扩散模型如何重塑视觉智能。涵盖数字图像表示、色彩空间、滤

本章内容包括:行为克隆(Behavioral Cloning, BC)及其误差界与复合误差推导、交互式校正(DAgger)与其保证、逆强化学习(IRL)与最大熵 IRL 的推导、生成对抗模仿(GAIL)的形式化与等价性证明、离线 RL 的核心挑战与保守化(举例 CQL)的理论直觉与推导,以及示范引导的在线精调(IBRL / IBORL 类方法)的原理与样本复杂度层面的直观保证。