




- @u011017694
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
图像复原一.图像退化/复原处理的模型二.噪声模型2.1使用imnoise添加噪声一.图像退化/复原处理的模型退化函数是指将退化过程模型化,它和加性噪声项一起,作用于输入图像f(x,y),产生一幅退化图像g(x,y):g(x,y)=H[f(x,y)]+η(x,y)g(x,y) = H[f(x,y)]+\eta(x,y)g(x,y)=H[f(x,y)]+η(x,y)若给定g、一些关于退化函数H的知识以
目录零之前言一.单匹配1.读入图片2.进行匹配3.读最大值坐标4.画框5.显示6.完整代码展示二.多匹配3.读取满足点坐标4.画框5.显示6.完整代码零之前言后面的学习还剩两大类:霍夫变换和图像特征的提取,都是一大章的,所以,只要本章独立了。一.单匹配模板匹配,只能匹配灰度图,对于其匹配方式,和 2D 卷积一样,它也是用模板图像在...
亮度变换与空间滤波一.背景知识二.亮度变换函数2.1函数imadjust2.2对数和对比度拉伸变换一.背景知识空间域技术则是直接对图像的像素进行操作。有表达式:g(x,y)=T[f(x,y)]g(x,y)=T[f(x,y)]g(x,y)=T[f(x,y)] 其中f是输入,g是输出。还有点(x,y)的临近点定义为.是中心位于(x,y)的正方形或长方形。(这就有意思了,边界可能不填充)二.亮度变换函数
零.前言学完了ROS的基础应用,我们就可以开始向更复杂的应用开始学习了,比如我们的SLAM。但是昂贵的底盘与激光雷达是学习这一部分的阻碍,为了弥补经费的不足,我们可以从0开始,创建一个自己的仿真小车,然后实现SLAM过程。最后真的有幸用到激光雷达和机器人底盘,那么直接移植写好的内容就可以了.本次实验的平台为ubuntu 20.04 + ros/noetic,无特殊说明,后面的教程都为这个。后面会把
刚入门硬件设计的同学,可能也和我一样,画PCB时,经常找不到合适的元件库。那么今天就给大家推荐一种方法,可以获得市面上绝大多数可用的元件库。以前我们是可以通过立创(就是你花5块钱打PCB的那个嘉立创的立创),下载各种元件的封装与库,可是现在立创将所有的封装都整合进他们的原创的立创EDA里了,习惯使用AD的同学,就没办法了。这个方法可以从立创EDA里提取想要的封装库:先进入立创EDA,创建一...
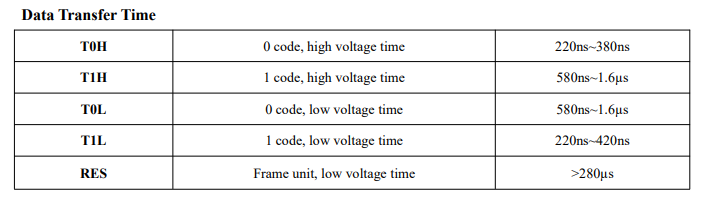
SPI的详情简介不必赘述。假设我们通过SPI发送0xAA,我们的数据线就会变为10101010,通过修改不同的内容,即可修改SPI中0和1的持续时间。比如0xF0即为前半周期为高电平,后半周期为低电平的状态。在SPI的通信模式中,CPHA配置会影响该实验,下图展示了不同采样位置的SPI时序图[1]。CPOL = 0,CPHA = 1:CLK空闲状态 = 低电平,数据在下降沿采样,并在上升沿移出CP
彩色图像处理一.Matlab中彩色图像的表示方法1.1RGB图像1.2索引图像1.3用来处理RGB图像或索引图像的IPT函数二.转换值其他彩色空间2.1NTSC彩色空间2.2YCbCr彩色空间2.3HSV色彩空间2.4CMY和CMYK彩色空间2.5 HSI彩色空间一.Matlab中彩色图像的表示方法一般来说在IPT里,彩色图像被当做索引图像和RGB图像来处理。所以重点学习这两个图像。1.1RGB图
一.创建Gazebo世界 先启动Gazebo,然后左上角Edit-Building Editor 随便画个地图,然后左上角Save Model 然后左上角退出编辑。 并在左上角继续,Save World AS保存在我们的slam_model/worlds下,比如叫个ackman_wall.world 修改launch,添加一行参数,加载我们的墙体: <include file="$
零之前言首先我们要准备的工具:Python、Fiddler(抓包工具)、Python的requests库。然后我们需要搞清楚一些概念cookie、状态码、爬虫的原理等基础知识。然后,冲冲冲!!!一.模拟登录我们打开抓包工具进行一次模拟登录:以下是流程与分析...
零.前言关于tf的内容,我也没有彻底理解透彻,只能讲述个大概,若有错误,请评论区斧正,谢谢。在《机器人基础》这个课里,有推导关于机器人坐标变换的说明,当然,我没学,学了也因为当时数学不好没听懂,所以这篇文章也不会讲太多数学层面的东西。一.概念1.1 引言我们知道,物体的位置是相对的。那么在描述一个系统中例如三个物体的位置关系,我们可以通过假设A为原点,计算B相对于A的坐标,C相对于A的坐标。这样可