




- @qq_55841287
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务

问题一:由于wsl2无法直接调用本机的摄像头,所以首先想要调用windows机器上的摄像头,要使用rtsp服务,在windows系统上建立一个rtsp服务器(使用easydarwin来建立),通过ffmpeg将本机(windows)的视频流推送到rtsp服务器上,然后在wsl ubuntu系统中使用ffmpeg去拉取rtsp服务器上面的视频流进行处理;简单来说,就是建立一个rtsp服务器,将wsl

nvidia-container-toolkit是Docker与NVIDIA GPU之间的桥梁,也就是只有安装了nvidia-container-toolkit,Docker才能使用本机的GPU;
问题一:由于wsl2无法直接调用本机的摄像头,所以首先想要调用windows机器上的摄像头,要使用rtsp服务,在windows系统上建立一个rtsp服务器(使用easydarwin来建立),通过ffmpeg将本机(windows)的视频流推送到rtsp服务器上,然后在wsl ubuntu系统中使用ffmpeg去拉取rtsp服务器上面的视频流进行处理;简单来说,就是建立一个rtsp服务器,将wsl
nvidia-container-toolkit是Docker与NVIDIA GPU之间的桥梁,也就是只有安装了nvidia-container-toolkit,Docker才能使用本机的GPU;
课程:6s081的2020版本的:https://pdos.csail.mit.edu/6.S081/2020/schedule.html。
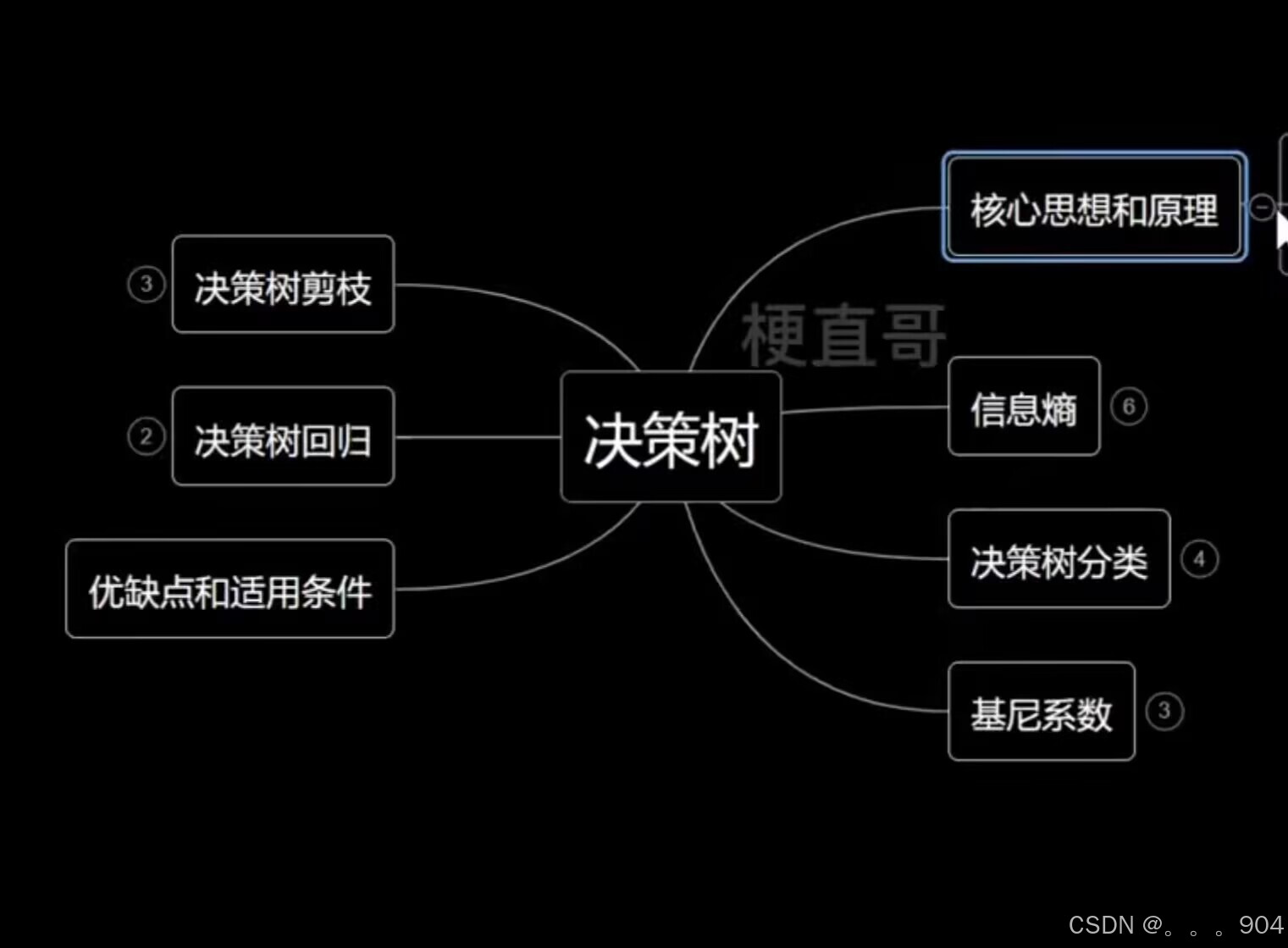
就是不断确定分裂点,将数据分开的过程。这个过程通过找到使得信息增益最大的数据特征及其特征值来确定分裂点,将数据分别左子树和右子树,然后不断对左右子树递归这个过程,直至达到我们对决策树的要求(比如限定了决策树的层数,限制了叶子节点的最小数据量之类的),叶子节点中样本数最多的类别就为这个叶子节点所属的类别。由于机器学习中,研究的都是一大堆数据,所以这里举一个包含多个数据的系统的信息熵,比如,这个系统中
网上找了很多方法都好像不起作用,没法,只能每次手动设置添加proxies。
