
写文章




- @qq_54900679
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
Joycon-Robotics库的安装报错解决记录
Joycon-Robotics仓库的安装记录
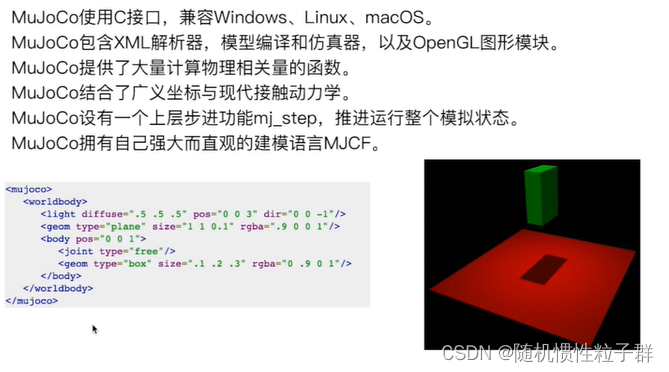
强化学习:MuJoCo机器人强化学习仿真入门(1)
强化学习:MuJoCo机器人强化学习仿真入门(1)
深度学习:Pytorch安装的torch与torchvision的cuda版本冲突问题与解决历程记录
深度学习:Pytorch安装的torch与torchvision的cuda版本冲突问题与解决历程记录

深度学习:Pytorch安装的torch与torchvision的cuda版本冲突问题与解决历程记录
深度学习:Pytorch安装的torch与torchvision的cuda版本冲突问题与解决历程记录
深度学习:Pytorch安装的torch与torchvision的cuda版本冲突问题与解决历程记录
深度学习:Pytorch安装的torch与torchvision的cuda版本冲突问题与解决历程记录
ROS机器人入门:机器人系统仿真【学习记录】——3
ROS机器人入门:机器人系统仿真【学习记录】——3

MATLAB机器人工具箱 机械臂仿真
采用 Standard DH 建模法
记录Ubuntu20.04安装mujoco与安装mujoco_py并测试时提示Cython.Compiler.Errors.CompileError的解决方案
安装mujoco_py并测试时提示Cython.Compiler.Errors.CompileError的解决方案

ROS机器人入门:机器人系统仿真【学习记录】——2
ROS机器人入门:机器人系统仿真
MATLAB绘制爱心
MATLAB绘制爱心