- @qq_44339029
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文主要详细介绍如何使用rapidjson库来实现.json文件的读取,分为相关基础介绍、结合简单示例进行基础介绍、结合复杂示例进行详细的函数实现介绍等三部分。

ubuntu右上角的网络连接图标消失解决办法 ubuntu更新了几个文件后,我的ubuntu系统右上角的网络连接图标就消失了,然后怎么也找不到了,怎么办呢? 1、按快捷键ctrl+alt+t打开终端 2、按以下顺序输入如下的命令行sudo service network-manager stopsudo rm /var/lib/NetworkManager/NetworkManager.
我会通过本系列文章,详细介绍如何从零开始用51单片机去实现智能小车的控制,在本系列的上一篇文章中介绍了如何让小车动起来,本文作为本系列的第二篇文章,主要介绍小让车实现自动避障所涉及的一些传感器,如超声波模块、漫反射光电管、4路红外寻迹避障传感器的介绍及使用。 对于熟悉这些模块的读者,可跳过此篇文章,直接阅读本系列的下一篇文章一、4路红外寻迹避障传感器模块 1、线路连接 传感器与控制
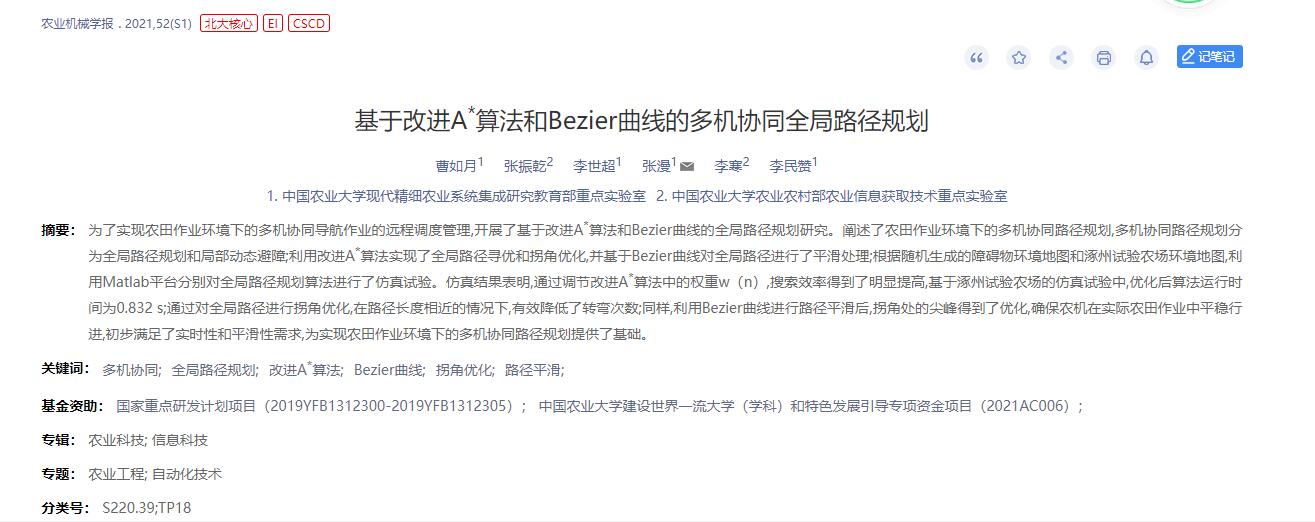
今天早上收到了一位粉丝的私信,问我:“基于改进A*算法和Bezier曲线的多机协同全局路径规划”这篇论文是否是我发表的,说论文的思路和我之前发的博客的思路一样 很遗憾,这篇论文不是我写的,而且作者跟我没有任何关系 出于好奇,我就去看了一下这篇于2021年12月8日发表于农业机械学报,同时有着北大核心、EI、CSCD等诸多“标识“”的论文 (注:我的博客发布于2020年10月初)
本文主要介绍如何利用MATLAB编程或者Simulink工具绘制伯德图和奈奎斯特图一、用程序绘制伯德图和奈奎斯特图 1、conv()函数的介绍 conv()函数可用于计算两个向量卷积,简单理解其实就是可以用来计算多项式乘法。我们用conv()函数可以很方便的对传递环数的分子或者分母进行计算, 举个例子比如系统的传递函数如下(本文以此传递函数介绍如何绘制图像):6(s+1)(s2+3s+5
1、添加ROS软件源 将以下命令复制到ubuntu的终端执行sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' 2、添加密钥 将以下命令复制到ubuntu的终端执行sud

本文主要介绍机器人学基础中非常常用的旋转矩阵转四元数的理论基础和对应的C++程序实现

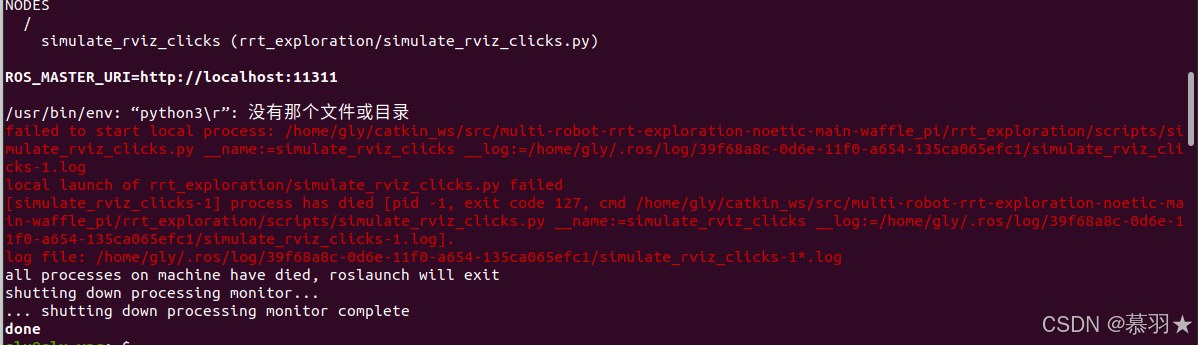
在Windows下对某个Python文件进行修改后,放到Ubuntu环境下运行时报错/usr/bin/env: “python3\r”: 没有那个文件或目录 failed to start local process,可以使用dos2unix工具来检查并修复换行符解决该问题
本篇文章主要与大家分享一下如何,文章内容处于更新和补充中,(我同时安装了机器人工具箱9.10版本和10.4版本) 二、 1、建立机器人模型 (1)Link类函数,基于DH法建模,建立其相关关系,DH法建模分改进型和标准型,Link类函数的一种用法是 R = Link([theta,d,a, alpha]),其中参数theta代表DH建模的关节角、参数d代表DH建模的连杆偏距、参数a代表
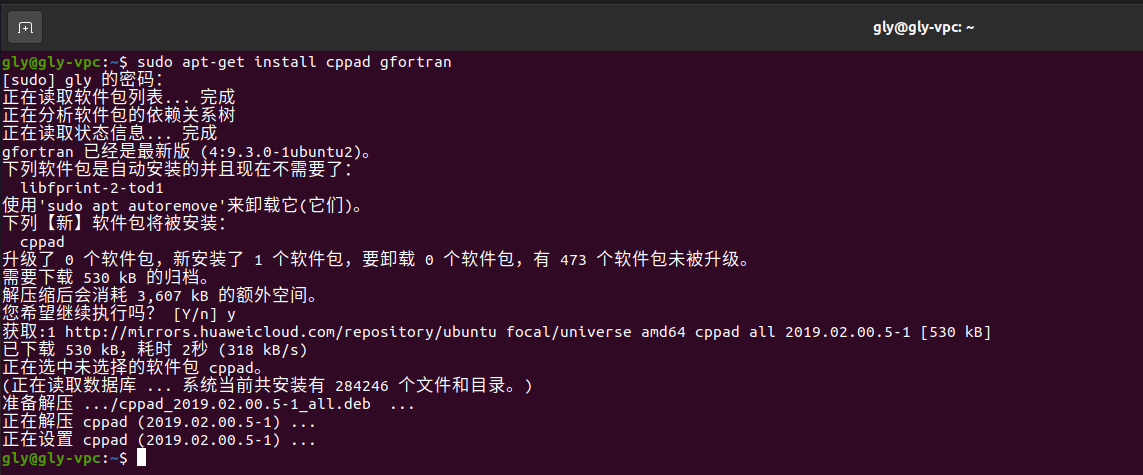
本文主要介绍在Ubuntu20.04中安装Ipopt库的流程,及过程报错的解决方法,已经有很多关于Ipopt安装的博客,但经过我的测试,很多都失效了,因此,经过探索,我找到可流畅的安装Ipopt的方法,现总结成本篇博客