




- @qq_43309940
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
在软件与更新里面附加驱动,选择上图查看的对应版本驱动。1)进入网站下载不带lowlatency的四个文件。2)在下载的文件夹位置打开终端,输入命令。最新的.tar.gz 版本(一般在最后)安装成功显示“成功”或者“done”如下图显示对应显卡型号即安装成功。2)在打开的文件最末输入命令。打开终端输入以下命令可以查看。3)安装成功后显示如下。
windows环境中在anaconda下利用conda安装pytorch,解决cuda和cudnn不可用的问题
运行OSU双足步行机器人 Cassie 早期实施的用强化学习算法使其站立的源码,由于时间较久,按照github上的说明运行有些错误,故根据自己的实现步骤重新记录。可以终止训练,数据保存在rallab库的data文件中(不是cassierl文件夹中用于安装模块的存储库,而是虚拟环境包中的rllab文件夹中)注意:使用虚拟环境运行时命令前不要加sudo,不然会给系统自带的python安装对应的库,此时
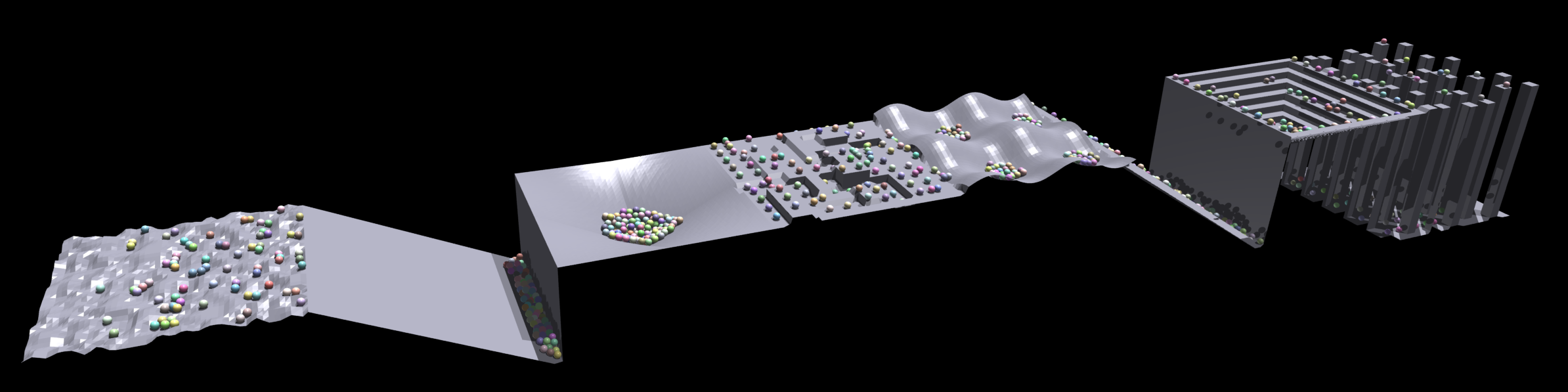
除了API提供的在仿真环境中添加平地面之外,我们还提供了用于生成不平坦地形的API和工具。可以使用将地形添加为静态三角网格。我们在中提供了一些简单地形的生成工具。和。然后可以使用将其转换为三角网格并添加到仿真中。请参阅以了解更多详细信息。我们还在我们的AnymalTerrain环境中展示了使用不平坦地形的强化学习示例,可以在找到。
Isaac Gym提供API来以编程方式控制场景的视觉方面。此外,Isaac Gym还提供API来管理多个摄像机的视图,并将这些摄像机视为机器人上的传感器。以下部分描述了摄像机属性、摄像机传感器、视觉属性修改和与图形和摄像机传感器相关的其他主题。

windows环境中在anaconda下利用conda安装pytorch,解决cuda和cudnn不可用的问题
Anaconda3 下载安装及不同python环境配置一、Anaconda3安装二、配置虚拟环境一、Anaconda3安装1、下载直接在官网下载即可:https://www.anaconda.com/download/2、正常安装,路径最好不要出现中文、空格,下图选择AllUsers,path可以直接勾选,也可自行配置,一般勾选上即可3、安装完后输入conda --version显示版本号即为安装
6、出现下面的黑框请不要关闭(mathematica在后台运行),此时会发现matlab中出现下图红框框中的结果,证明该软件安装成功。中的79-102行忽略了质量和惯性为零的链接,从而导致意外的错误。同样的方法,找到该文件所在的路径,替换掉上面解决方案中的路径即可,这一错误也可参照官方的github中的。5、如果上面一步操作成功会弹出下面的对话框,选择Mathematica路径下的math.exe
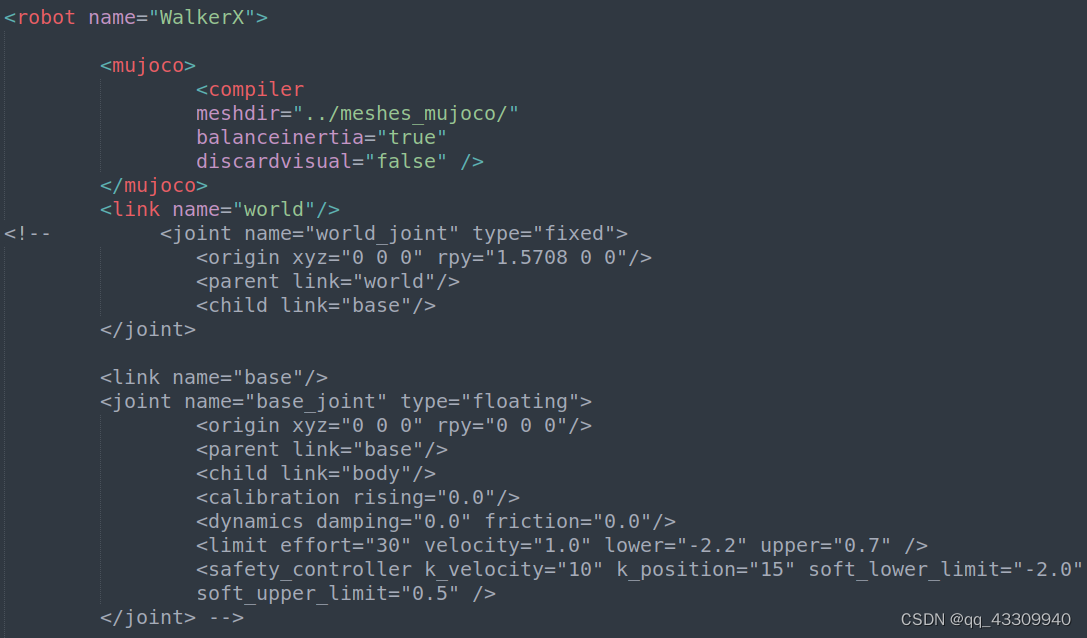
另外,在MuJoCo的界面,可以通过按键盘数字键0和1进行视觉上的切换(视觉mesh与碰撞mesh)。2、在xacro/urdf文件添加一些必要的MuJoCo的tag用于控制编译选项。文件进行简化,变成球、圆柱、立方体等,视觉效果会差很多,因此建议设为。验证是否安装成功(运行下面代码,出现小人证明安装成功)1、urdf文件中的mesh文件需要转化为stl格式。官方说明可以转换成三种模型,我们一般用
~~标题# 系列文章目录提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加例如:第一章 Python 机器学习入门之pandas的使用提示:写完文章后,目录可以自动生成,如何生成可参考右边的帮助文档文章目录~~前言一、pandas是什么?二、使用步骤1.引入库2.读入数据总结前言一、pandas是什么?二、使用步骤1.引入库2.读入数据总结前言提示:这里可以添加本文要记录的大概内容: